Deel B berekeningen 12 Horizontaal alignement12...
32
1 Verkeerstechnische berekening ............................................................................. 2 Deel A: Algemeen verklarend .............................................................. 3 Horizontaal alignement ............................................................................................ 3 De overgangsboog ............................................................................................................ 3 De cirkelboog..................................................................................................................... 5 Uitvoegingen...................................................................................................................... 6 Splitsingen ......................................................................................................................... 7 Rangeerbanen ................................................................................................................... 8 Invoegingen ....................................................................................................................... 8 Weefvakken ....................................................................................................................... 9 Conclusie horizontaal alignement algemeen: ..................................................................... 9 Verticaal alignement .............................................................................................. 10 De langshelling ................................................................................................................ 10 De verticale boog ............................................................................................................. 11 Conclusie verticaal alignement algemeen ........................................................................ 11 Deel B berekeningen .......................................................................... 12 Horizontaal alignement .......................................................................................... 12 Berekening overgangsboog en cirkelboog Noord Oost aslijn (1.1) ................................... 12 Te berekenen bogen: ....................................................................................................... 16 Conclusie horizontaal alignement berekenen: .................................................................. 16 Verticaal alignement .............................................................................................. 17 Berekeningsmethode ....................................................................................................... 17 Conclusie verticaal alignement berekenen ....................................................................... 17 Deel C overzicht spreadsheets .......................................................... 18 Horizontaal alignement .......................................................................................... 18 Boog 1.1 .......................................................................................................................... 19 Boog 1.2 .......................................................................................................................... 20 Boog 2.1 .......................................................................................................................... 21 Boog 2.2 .......................................................................................................................... 22 Boog 3.1 .......................................................................................................................... 23 Boog 3.2 .......................................................................................................................... 24 Boog 4.1 .......................................................................................................................... 25 Boog 4.2 .......................................................................................................................... 26 Berekening lengte uitrijstrook ........................................................................................... 27 Verticaal alignement .............................................................................................. 29 Boog 1.1 .......................................................................................................................... 29 Boog 1.2 .......................................................................................................................... 29 Boog 2.1 .......................................................................................................................... 30 Boog 2.2 .......................................................................................................................... 30 Boog 3.1 .......................................................................................................................... 31 Boog 3.2 .......................................................................................................................... 31 Boog 4.1 .......................................................................................................................... 32 Boog 4.2 .......................................................................................................................... 32
-
Upload
nguyenphuc -
Category
Documents
-
view
222 -
download
0
Transcript of Deel B berekeningen 12 Horizontaal alignement12...
1
Verkeerstechnische berekening ............................................................................. 2 Deel A: Algemeen verklarend ..............................................................3 Horizontaal alignement............................................................................................ 3
De overgangsboog ............................................................................................................ 3 De cirkelboog..................................................................................................................... 5 Uitvoegingen...................................................................................................................... 6 Splitsingen ......................................................................................................................... 7 Rangeerbanen................................................................................................................... 8 Invoegingen ....................................................................................................................... 8 Weefvakken....................................................................................................................... 9 Conclusie horizontaal alignement algemeen:..................................................................... 9
Verticaal alignement .............................................................................................. 10 De langshelling ................................................................................................................ 10 De verticale boog............................................................................................................. 11 Conclusie verticaal alignement algemeen........................................................................ 11
Deel B berekeningen ..........................................................................12 Horizontaal alignement.......................................................................................... 12
Berekening overgangsboog en cirkelboog Noord Oost aslijn (1.1) ................................... 12 Te berekenen bogen:....................................................................................................... 16 Conclusie horizontaal alignement berekenen:.................................................................. 16
Verticaal alignement .............................................................................................. 17 Berekeningsmethode....................................................................................................... 17 Conclusie verticaal alignement berekenen....................................................................... 17
Deel C overzicht spreadsheets ..........................................................18 Horizontaal alignement.......................................................................................... 18
Boog 1.1 .......................................................................................................................... 19 Boog 1.2 .......................................................................................................................... 20 Boog 2.1 .......................................................................................................................... 21 Boog 2.2 .......................................................................................................................... 22 Boog 3.1 .......................................................................................................................... 23 Boog 3.2 .......................................................................................................................... 24 Boog 4.1 .......................................................................................................................... 25 Boog 4.2 .......................................................................................................................... 26 Berekening lengte uitrijstrook........................................................................................... 27
Verticaal alignement .............................................................................................. 29 Boog 1.1 .......................................................................................................................... 29 Boog 1.2 .......................................................................................................................... 29 Boog 2.1 .......................................................................................................................... 30 Boog 2.2 .......................................................................................................................... 30 Boog 3.1 .......................................................................................................................... 31 Boog 3.2 .......................................................................................................................... 31 Boog 4.1 .......................................................................................................................... 32 Boog 4.2 .......................................................................................................................... 32
2
Verkeerstechnische berekening
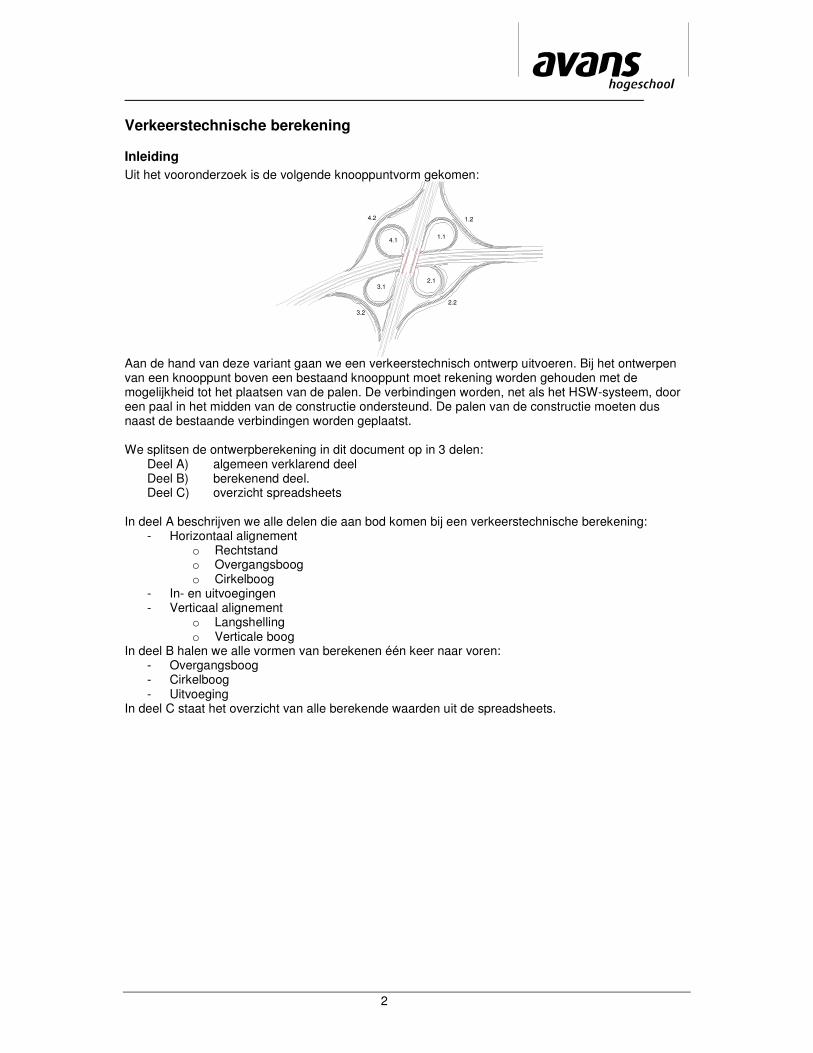
Inleiding Uit het vooronderzoek is de volgende knooppuntvorm gekomen:
1.1
3.2
3.1
4.1
1.2
2.2
4.2
2.1
Aan de hand van deze variant gaan we een verkeerstechnisch ontwerp uitvoeren. Bij het ontwerpen van een knooppunt boven een bestaand knooppunt moet rekening worden gehouden met de mogelijkheid tot het plaatsen van de palen. De verbindingen worden, net als het HSW-systeem, door een paal in het midden van de constructie ondersteund. De palen van de constructie moeten dus naast de bestaande verbindingen worden geplaatst. We splitsen de ontwerpberekening in dit document op in 3 delen:
Deel A) algemeen verklarend deel Deel B) berekenend deel. Deel C) overzicht spreadsheets
In deel A beschrijven we alle delen die aan bod komen bij een verkeerstechnische berekening:
- Horizontaal alignement o Rechtstand o Overgangsboog o Cirkelboog
- In- en uitvoegingen - Verticaal alignement
o Langshelling o Verticale boog
In deel B halen we alle vormen van berekenen één keer naar voren: - Overgangsboog - Cirkelboog - Uitvoeging
In deel C staat het overzicht van alle berekende waarden uit de spreadsheets.
3
Deel A: Algemeen verklarend
Horizontaal alignement Het horizontale alignement bestaat uit drie basis ontwerpelementen namelijk; overgangsboog, cirkelboog en rechtstand. Aan deze elementen worden eisen gesteld, onder andere voor de grootte, aaneenschakeling en detaillering. Deze komen hieronder aan bod.
De overgangsboog
De overgangsboog wordt toegepast tussen rechtstanden en bogen en tussen bogen onderling. De overgangsboog heeft de volgende functies:
• Het mogelijk maken van een geleidelijke stuurverdraaiing; • ruimte voor een geleidelijke verkantingsovergang; • het geleidelijk aanbrengen van de benodigde bochtverbreding; • het vermijden van knikken in het wegbeeld.
De overgangsboog ofwel de clotoïde dient bij de volgende cirkelbogen te worden toegepast. V0 = 120km/h : R < 4000 m V0 = 90km/h : R < 2000 m V0 = 70km/h : R < 800 m V0 = 50km/h : R < 300 m De clotoïde wordt berekend met de formule: LRA *2 = R: de straal van de cirkelboog; A: de parameter van de clotoïde; L: de lengte van de overgangsboog. De parameter van de clotoïde moet aan een aantal eisen voldoen, namelijk:
• Optische eis: 1/3R�A�R o Waar zicht nodig is op de boog i.v.m. snelheidsaanpassing moet een deel van de
cirkelboog binnen het functionele gezichtsveld liggen (A�R) o De clotoïde moet de richtingsverandering duidelijk inleiden; hiervoor is een
hoekverdraaiing van 3,5o gewenst (A�R). • Comfort eis/Verkeerstechnische eis: A � 0,207√√√√v3 bij V0 = 120/90km/h
A � 0,164√√√√v3 bij V0 = 70/50km/h V0 = 120km/h : A = 270m V0 = 90km/h : A = 175m V0 = 70km/h : A = 95m V0 = 50km/h : A = 60m
Door de parameter en de straal van cirkelboog in te vullen in de formule kan de lengte L van de overgangsboog worden berekend.
4
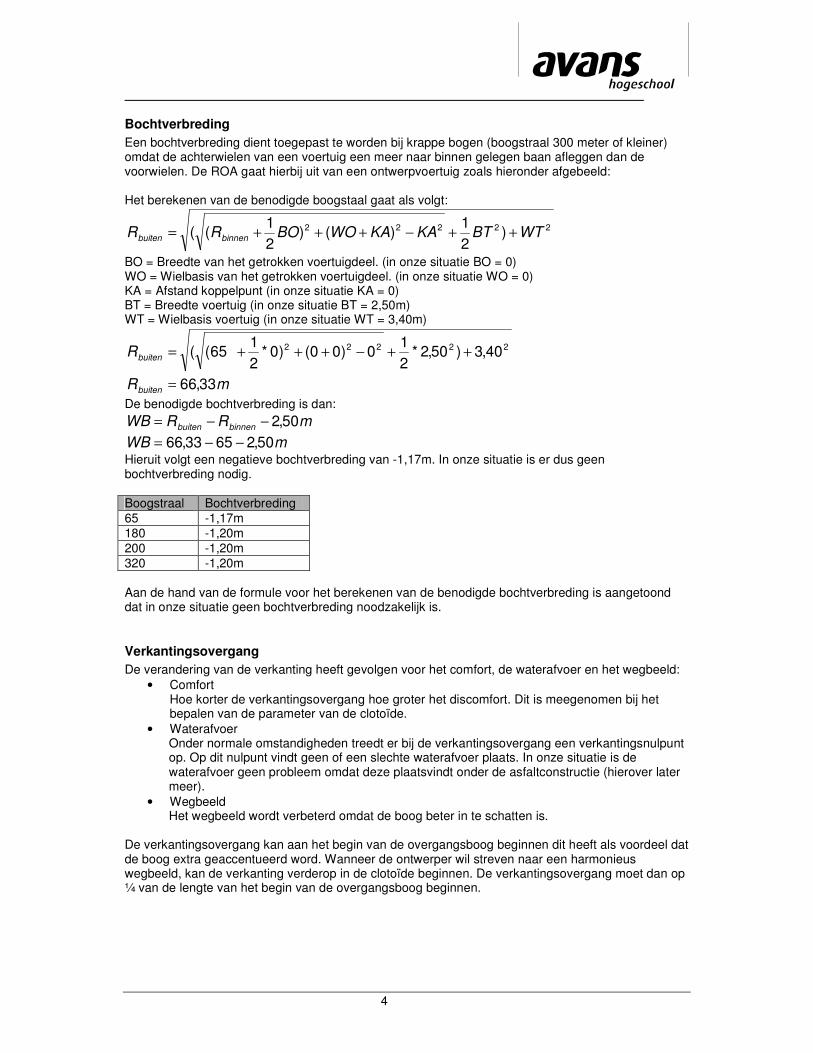
Bochtverbreding Een bochtverbreding dient toegepast te worden bij krappe bogen (boogstraal 300 meter of kleiner) omdat de achterwielen van een voertuig een meer naar binnen gelegen baan afleggen dan de voorwielen. De ROA gaat hierbij uit van een ontwerpvoertuig zoals hieronder afgebeeld: Het berekenen van de benodigde boogstaal gaat als volgt:
22222 )21
)()21
(( WTBTKAKAWOBORR binnenbuiten ++−+++=
BO = Breedte van het getrokken voertuigdeel. (in onze situatie BO = 0) WO = Wielbasis van het getrokken voertuigdeel. (in onze situatie WO = 0) KA = Afstand koppelpunt (in onze situatie KA = 0) BT = Breedte voertuig (in onze situatie BT = 2,50m) WT = Wielbasis voertuig (in onze situatie WT = 3,40m)
22222 40,3)50,2*21
0)00()0*21
65(( ++−+++=buitenR
mRbuiten 33,66= De benodigde bochtverbreding is dan:
mRRWB binnenbuiten 50,2−−=
mWB 50,26533,66 −−= Hieruit volgt een negatieve bochtverbreding van -1,17m. In onze situatie is er dus geen bochtverbreding nodig. Boogstraal Bochtverbreding 65 -1,17m 180 -1,20m 200 -1,20m 320 -1,20m Aan de hand van de formule voor het berekenen van de benodigde bochtverbreding is aangetoond dat in onze situatie geen bochtverbreding noodzakelijk is.
Verkantingsovergang De verandering van de verkanting heeft gevolgen voor het comfort, de waterafvoer en het wegbeeld:
• Comfort Hoe korter de verkantingsovergang hoe groter het discomfort. Dit is meegenomen bij het bepalen van de parameter van de clotoïde.
• Waterafvoer Onder normale omstandigheden treedt er bij de verkantingsovergang een verkantingsnulpunt op. Op dit nulpunt vindt geen of een slechte waterafvoer plaats. In onze situatie is de waterafvoer geen probleem omdat deze plaatsvindt onder de asfaltconstructie (hierover later meer).
• Wegbeeld Het wegbeeld wordt verbeterd omdat de boog beter in te schatten is.
De verkantingsovergang kan aan het begin van de overgangsboog beginnen dit heeft als voordeel dat de boog extra geaccentueerd word. Wanneer de ontwerper wil streven naar een harmonieus wegbeeld, kan de verkanting verderop in de clotoïde beginnen. De verkantingsovergang moet dan op ¼ van de lengte van het begin van de overgangsboog beginnen.

5
De cirkelboog
Bij het ontwerpen van bogen spelen zowel berijdbaarheid als visuele aspecten een rol. De minimale boogstraal wordt benaderd door de volgende formule, hierbij wordt rekening gehouden met het verband tussen boogstraal, snelheid, wrijving en verkanting.
)100
(127
20
ifz
VRh
+=
Rh = de straal van de horizontale boog in m; V0 = de ontwerpsnelheid in km/h; g = de versnelling van de zwaartekracht (9,81 m/sec2); fz = de zijdelingse wrijvingsweerstand; i = de verkanting in procenten. V0 50 km/h 70 km/h 90 km/h 120 km/h Fz* 0,18 0,16 0,13 0,10
Verkanting De verkanting dient om de middelpuntsvliegende kracht op te vangen, de zichtbaarheid van de boog te verbeteren en de waterafvoer te waarborgen. De verkanting bedraagt minimaal 2,5% uit overweging van waterafvoer en is maximaal 8%. Bij een krappere boog zal een evenredig grotere verkanting worden toegepast. Aanname
V0 Rh i 120 km/h 760m 5% 90 km/h 320m 7% 70 km/h 170m 7% 50 km/h 75m 8%
Zichtafstanden Bij het ontwerpen van een boog dient het zicht op twee plaatsen te worden getoetst, namelijk voor en in de boog. Er moet voldoende zicht aanwezig zijn om de boog te kunnen detecteren en inschatten. Het zicht in de boog moet voldoende zijn om te kunnen reageren op situaties die zich stroomafwaarts voordoen. Bij krappe bogen dienen zichtbelemmerende objecten zoveel mogelijk te worden vermeden, zoals beplanting en geleiderail constructies.

6
Het ontwerpen van de alignementen 2.2 en 4.2 Na het berekenen van de horizontale alignementen 2.2 en 4.2 blijkt dat deze de alignementen 2.1 en 4.1 snijden. Om dit te voorkomen verdelen we de hoek ϕ in twee gelijke hoeken. De alignementen zijn dan als volgt opgebouwd: overgangsboog, cirkelboog, overgangsboog, rechtstand, overgangsboog, cirkelboog en overgangsboog. Het berekenen van deze alignementen is vergelijkbaar met het berekenen van de overige alignementen (zie deel B). De ontwerpsnelheid van beide alignementen wordt verlaagd naar 70km/h zodat er minder ruimte nodig is om de verbinding te realiseren
Uitvoegingen
Een uitvoeging is een divergentiepunt waar een rijbaan, die meestal een lagere ontwerpsnelheid heeft dan de doorgaande rijbaan, aftakt van de doorgaande rijbaan. De rechterrijstrook van de hoofdrijbaan blijft ongemoeid doorlopen. Wanneer de rechterrijstroken van de hoofdrijbaan worden voortgezet in de afbuigende rijbaan ontstaat een splitsing. Vormgeving 1,2 - 2,2 - 3,2 - 4,2 In de ROA staat een dubbelbaans doorgaande weg met een enkelbaans uitvoeging. Deze vorm lijkt het meeste op de vorm die wij toe gaan passen, echter is er in ons geval sprake van een enkelbaans doorgaande weg. Omdat wij de lengte van de uitvoeging willen verminderen in verband met de constructie, en de hieraan verbonden kosten, gaan we op zoek naar reducerende factoren. Factoren die aan bod komen bij de lengtebepaling van de uitrijstrook: Vaste waardes
- Dubbele belijning van 50 m - L (L1 + L2) - Deceleratie lengte Ld - Deceleratie lengte Ld`
midden overgangsboog
aftakkende rijbaan
Ld`
L uitrijstrook
deceleratielengte Ld
L2L150,00
puntstuk
Opnieuw bepalen van de lengte van de uitrijstrook.
We bepalen de lengte van de uitrijstrook aan de hand van de volgende variabelen: - helling lengteprofiel 2,5% (Hoogte verschil gedeeld door de lengte) - vertraging 1,5-2,5 m/s2 (comforteis ROA) - rijstrookwisseling 3,5 sec (bijlage 4.3 ROA-alignementen; mei 1991) - voorbereidingstijd 1,5 sec (dubbele belijning)

7
Berekening methode: Stijgen dalen Als eerste wordt er onderscheid gemaakt tussen een stijgende en dalende afrit. Het verschil is natuurlijk terug te vinden in de zwaartekracht. Als er van een helling af wordt gereden zal er harder geremd moeten worden om dezelfde deceleratie te bereiken als er tegen en helling op wordt gereden. Ontwerpsnelheid In de berekening van de uitrijstrook komen 2 ontwerpsnelheden naar voren: V0 en Ve. V0 is de ontwerpsnelheid voor de doorgaande weg, deze houden we overal aan op 90 km/h. ,i.v.m. het toepassen van een redresseerstrook, Ve is de ontwerpsnelheid voor de boog. De bepaling van deze snelheid gebeurt aan de hand van de hoekverdraaiing en de en de hierin globaal in te passen straal met oog op de beschikbare ruimte. Vertraging Om de benodigde remweg te bepalen wordt er rekening gehouden met twee type weggebruikers. De ene weggebruiker benut de totale lengte van de invoegstrook om met een comfortabele vertraging van 1,5m/sec2 de gewenste snelheid te bereiken ter hoogte van het begin van het puntstuk. De andere weggebruiker voegt pas uit ter plaatse van het puntstuk en past zijn snelheid aan met een vertraging van 2,5m/sec2, deze moet halverwege de overgangsboog de gewenste snelheid hebben bereikt. Het begin van het puntstuk wordt dus bepaald door de deceleratie lengte te bepalen met een vertraging van 2,5m/sec2. De lengte van de invoeging wordt bepaald door de deceleratie lengte met een vertraging van 1,5m/sec2
Minimale lengte uitrijstrook i.v.m. rijstrookwisseling De lengte van de uitrijstrook (L) hangt samen met de tijd die een bestuurder nodig heeft om van rijstrook te wisselen. Voor het wisselen van één rijstrook gaat de ROA uit van 3,5 sec. De tijd die nodig is om van de linkerbaan op de uitrijstrook te komen komt dan op 7 sec wat dan een lengte met zich meebrengt van 233 meter bij een snelheid van 120 km/h. De ROA hanteert in deze situatie 250 m voor de lengte L. Omdat bij de HSW maar sprake is van één rijstrook is er maar 3,5 sec. nodig dit komt dan overeen met een lengte van 116 meter. Een sterke reducering van de lengte dus. Nu de lengte L bekend is hoeft de vertraging niet 2,5 m/s2 te zijn.
Splitsingen
Een splitsing is een divergentiepunt waar een rijbaan wordt gesplitst in twee min of meer gelijkwaardige rijbanen met ongeveer dezelfde ontwerpsnelheid. Bij een splitsing wordt de rechterrijstrook van de rijbaan voor het divergentiepunt altijd voortgezet in de rechterrijbaan na dat punt.

8
Rangeerbanen
Een rangeerbaan is een verbindingsschakel tussen de hoofdrijbanen en de verbindingswegen of toe, - en afritten ter plaatse van een knooppunt of aansluiting. Een rangeerbaan heeft als functie het voorkomen van turbulentie op de hoofdrijbaan doordat er minder toe, - en afritten direct op de hoofdrijbaan aansluiten. De rangeerbaan vergroot de capaciteit van de hoofdrijbaan en biedt capaciteit voor de daarlangs gelegen weefvakken. De rangeerbaan heeft tevens een lagere ontwerpsnelheid dan de hoofdrijbaan waardoor dit wegvak de mogelijkheid biedt tot krappere maatvoering van alle erop aansluitende elementen en hun onderlinge afstand.
Invoegingen
Een invoeging is een convergentiepunt waar een rijbaan, met een lagere ontwerpsnelheid dan de hoofdrijbaan, invoegt op de hoofdrijbaan. Het invoegen dient aan de rechterzijde van de hoofdrijbaan te geschieden middels een invoegstrook. De invoegstrook heeft als functie het invoegende verkeer in staat te stellen om zijn snelheid aan te passen. De invoegstrook dient zodanig uitgevoerd te worden dat de weggebruiker tijdig een goed beeld krijgt van de plaats en de wijze van invoegen. Vormgeving Een groot deel van de voertuigen rijdt kort na het einde van het puntstuk de doorgaande rijbaan op. Om voldoende snelheid en zicht van het invoegende verkeer te waarborgen dient een puntstuk te worden toegepast van voldoende lengte onder een kleine hoek van 2 a 3% met de hoofdrijbaan
Lengte puntstuk
V0= 120km/h �100m V0= 90km/h �75m V0= 70km/h �60m Lengte invoeging V0= 120km/h �350m V0= 90km/h �265m V0= 70km/h �210m Controle acceleratie lengte
)100
(256
)*75,0( 220
pga
VVL b
a
+
−=
V0= ontwerpsnelheid doorgaande rijbaan Vb= ontwerpsnelheid begin acceleratielengte a = de versnelling van personenauto’s in m/sec.2 (1m/sec2) g = de versnelling van de zwaartekracht in m/sec.2 p = de langshelling van de weg in procenten.
stijgend dalend Vb V0 La La 50 70 13,0 7,9 50 90 104,4 63,3 50 120 284,3 172,3 70 90 -17,45 -10,6 70 120 162,5 98,5 90 120 0 0

9
Weefvakken
Wanneer een convergentiepunt op korte afstand gevolgd wordt door een divergentiepunt wordt het tussenliggende wegvak vormgegeven als een weefvak. De invloedsgebieden van het in, - en uitvoegende verkeer overlappen elkaar, de voertuigen die de hoofdrijbaan willen verlaten of oprijden moeten met elkaar weven. Wanneer rangeerbanen worden toegepast, zoals in onze situatie, wordt volstaan met een minimale lengte van 200m.
Conclusie horizontaal alignement algemeen:
Uit het verkeerstechnisch onderzoek is gebleken dat het niet mogelijk is om een knooppunt te realiseren tussen de H27 en de H15. Er is namelijk te weinig ruimte voor het toepassen van rangeerbanen en uitvoegingen. Deze zijn nodig zodat de weggebruiker zijn/haar snelheid aan kan passen. Om het knooppunt te realiseren moeten twee HSW-systemen naast elkaar geplaatst worden. Op deze manier worden er drie rijbanen gerealiseerd voor iedere rijrichting. Het HSW-systeem bestaat dan uit een doorgaande rijbaan, een rangeerbaan en een uitvoegstrook. Voor en na de knooppunten wordt er een enkel HSW-systeem toegepast. De berekenings methode is te vinden in deel B en een overzicht van de spreadsheets is te vinden in deel C.
10
Verticaal alignement Na het berekenen van het horizontale alignement wordt er gekeken naar het verticale alignement. We zullen het doorgaande traject niet berekenen omdat dit bepaalde afstanden zijn vanaf het bestaande wegdek. Wel zullen we kijken naar de op- en afritten. Deze toetsen we of dat het hoogte verschil tussen de twee hogesnelwegen te overbruggen is in de op- en afritten. Er zal hier een maximaal hoogte verschil zijn van 5,5m. Dit is de doorrij hoogte van 4,5m en een constructiehoogte van 1,0m. De langshelling Bij de langshelling komen er 2 elementen naar voren:
- hellingspercentage - hellingslengte.
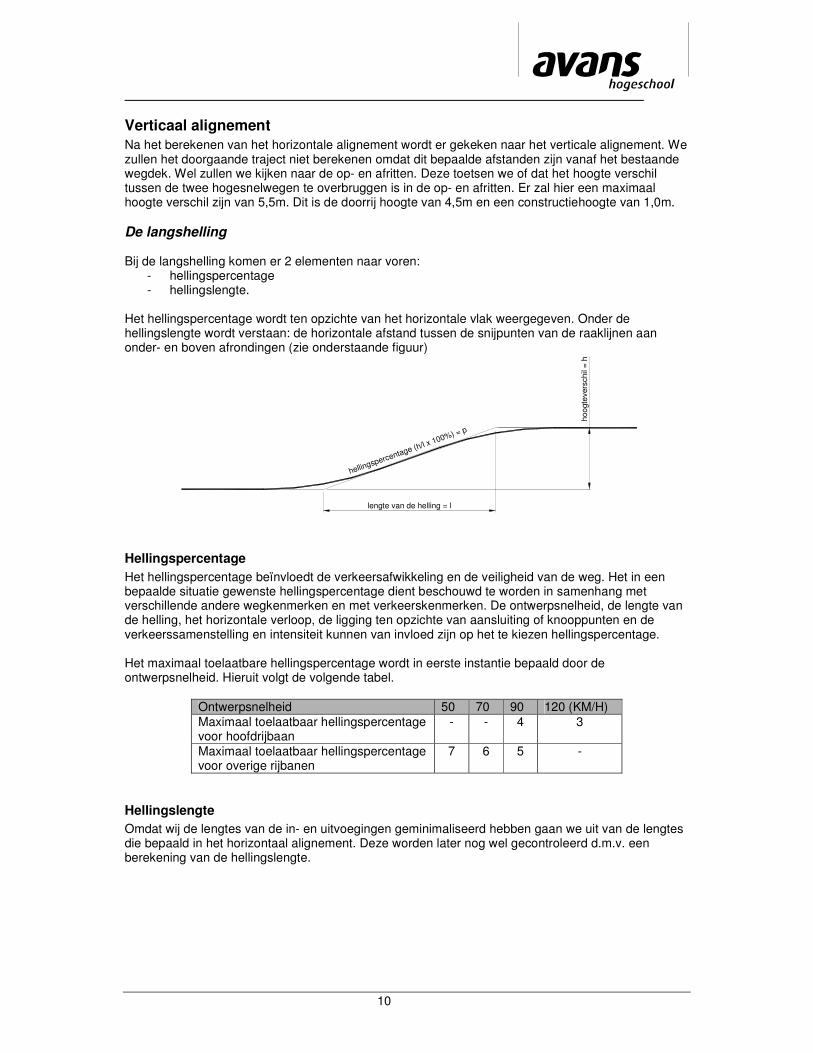
Het hellingspercentage wordt ten opzichte van het horizontale vlak weergegeven. Onder de hellingslengte wordt verstaan: de horizontale afstand tussen de snijpunten van de raaklijnen aan onder- en boven afrondingen (zie onderstaande figuur)
hellingspercentage (h/l x 100%) = p
hoog
teve
rsch
il =
h
lengte van de helling = l
Hellingspercentage Het hellingspercentage beïnvloedt de verkeersafwikkeling en de veiligheid van de weg. Het in een bepaalde situatie gewenste hellingspercentage dient beschouwd te worden in samenhang met verschillende andere wegkenmerken en met verkeerskenmerken. De ontwerpsnelheid, de lengte van de helling, het horizontale verloop, de ligging ten opzichte van aansluiting of knooppunten en de verkeerssamenstelling en intensiteit kunnen van invloed zijn op het te kiezen hellingspercentage. Het maximaal toelaatbare hellingspercentage wordt in eerste instantie bepaald door de ontwerpsnelheid. Hieruit volgt de volgende tabel.
Ontwerpsnelheid 50 70 90 120 (KM/H) Maximaal toelaatbaar hellingspercentage voor hoofdrijbaan
- - 4 3
Maximaal toelaatbaar hellingspercentage voor overige rijbanen
7 6 5 -
Hellingslengte Omdat wij de lengtes van de in- en uitvoegingen geminimaliseerd hebben gaan we uit van de lengtes die bepaald in het horizontaal alignement. Deze worden later nog wel gecontroleerd d.m.v. een berekening van de hellingslengte.
11
De verticale boog
Voor de afronding van verschillen in langshelling wordt de cirkelboog gebruikt. Holle en bolle cirkelbogen kunnen direct op elkaar worden aangesloten of worden verbonden door een rechtstand. Deze rechtstand wordt alleen toegepast bij lange hellingen.
Bolle boog De bolle bogen worden bepaald vanuit de zichtafstand. Deze is volgens de ROA maatgevend. Hieruit volgt de volgende tabel:
Ontwerpsnelheid Zichtafstand Rbol(m) minimaal op grond van de zichtafstand
50 55 1400 70 90 3700 90 120 6500 120 165 12400
Holle boog Bij holle bogen mag uit het oogpunt van rijcomfort de toename van de verticale versnelling niet meer dan 1,0 m/sec2 zijn. De duidelijkheid van het wegbeeld zal echter eerder maargevend zijn voor de dimensionering dan de comforteisen. Om de indruk van tegenbogen of knikken te vermijden in respectievelijk gebogen of rechte wegvlakken is over het algemeen voldoende voor de holle boog een waarde te kiezen die tweemaal zo groot is als de daaropvolgende bolle boog (Rhol = 2 x Rbol) Hieruit volgt de volgende tabel:
Rhol minimaal (meters) Vontwerp (km/h) comfort Duidelijk wegbeeld
50 200 2800 70 400 7400 90 700 13000 120 1200 24800
Of
2 x Rbol
Nu de bogen en het hoogte verschil bekend zijn kan de berekening van de hellingslengte worden uitgevoerd. Deze berekening is te vinden onder deel B.
Conclusie verticaal alignement algemeen
Na het berekenen van de verticale alignementen zijn deze lengte vergeleken met de lengtes die verkregen zijn bij het horizontale alignement. De berekenings methode is te vinden in deel B en een overzicht van de spreadsheets is te vinden in deel C.
12
Deel B berekeningen
Horizontaal alignement
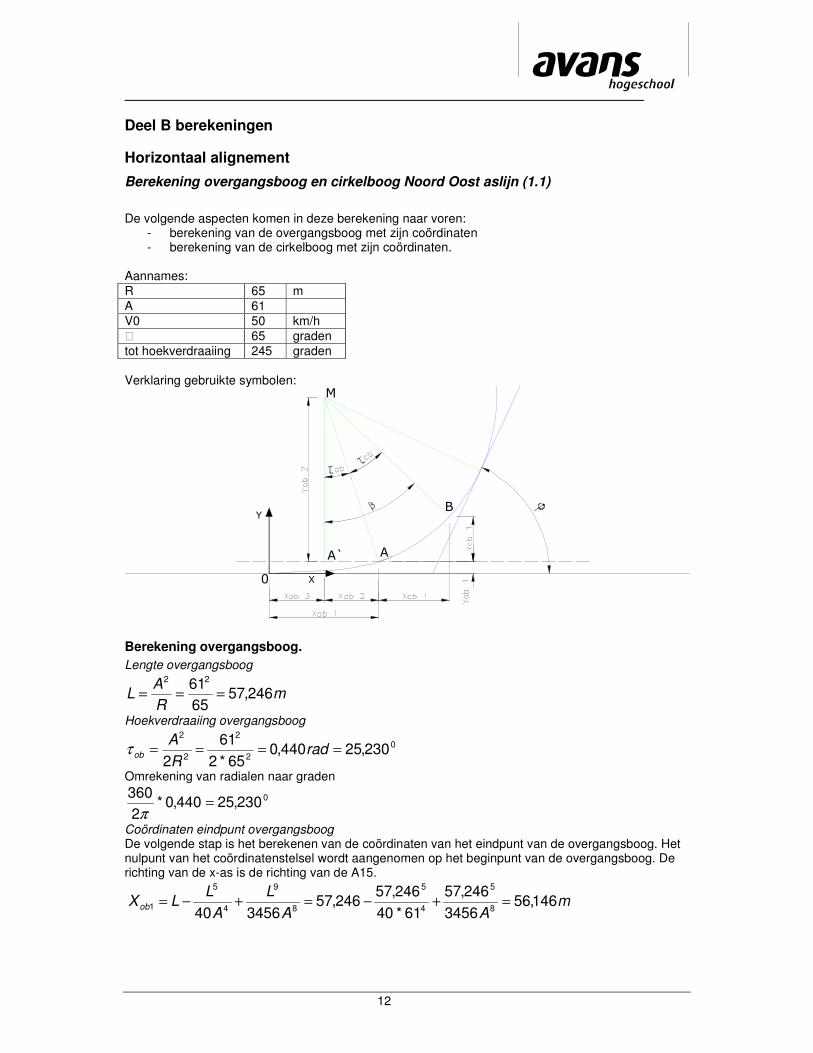
Berekening overgangsboog en cirkelboog Noord Oost aslijn (1.1)
De volgende aspecten komen in deze berekening naar voren:
- berekening van de overgangsboog met zijn coördinaten - berekening van de cirkelboog met zijn coördinaten.
Aannames: R 65 m A 61 V0 50 km/h � 65 graden tot hoekverdraaiing 245 graden Verklaring gebruikte symbolen:
�
�
��
�
�
�
�
Berekening overgangsboog. Lengte overgangsboog
mRA
L 246,57656122
===
Hoekverdraaiing overgangsboog
02
2
2
2
230,25440,065*2
612
==== radRA
obτ
Omrekening van radialen naar graden
0230,25440,0*2360 =
π
Coördinaten eindpunt overgangsboog De volgende stap is het berekenen van de coördinaten van het eindpunt van de overgangsboog. Het nulpunt van het coördinatenstelsel wordt aangenomen op het beginpunt van de overgangsboog. De richting van de x-as is de richting van de A15.
mAA
LA
LLX ob 146,56
3456246,57
61*40246,57
246,57345640 8
5
4
5
8
9
4
5
1 =+−=+−=

13
mA
LA
LAL
Yob 287,861*44240
246,5761*336
246,5761*6
246,57442403366 10
11
6
7
2
3
10
11
6
7
2
3
1 =+−=+−=
De coördinaten van het eindpunt van de overgangsboog (punt A) zijn dus: (56,146;8,287). Coordinaten punten A`.
mRX obob 707,27230,25sin65sin*2 === τ
mXXX obobob 439,28707,27146,56213 =−=−= A en A`liggen op dezelfde y waarde. De coördinaten van punt A`: (28,439;8,287) Berekening van de coördinaten van het middenpunt van de boog, punt M. Het middenpunt van de cirkelboog ligt boven punt A`. De coördinaten van middenpunt M kunnen dus berekend worden:
( ) mYMAMAAÁMA ob 799,5822'22 =→+=
65 cos 39,7695 = 49,961m. y coördinaat : yob1 + yob2 = 8,287+58,799 = 67,086m x coördinaat : komt overeen met de x waarde van A` = 28,439m De coördinaten van punt M: (28,439;67,086)
14
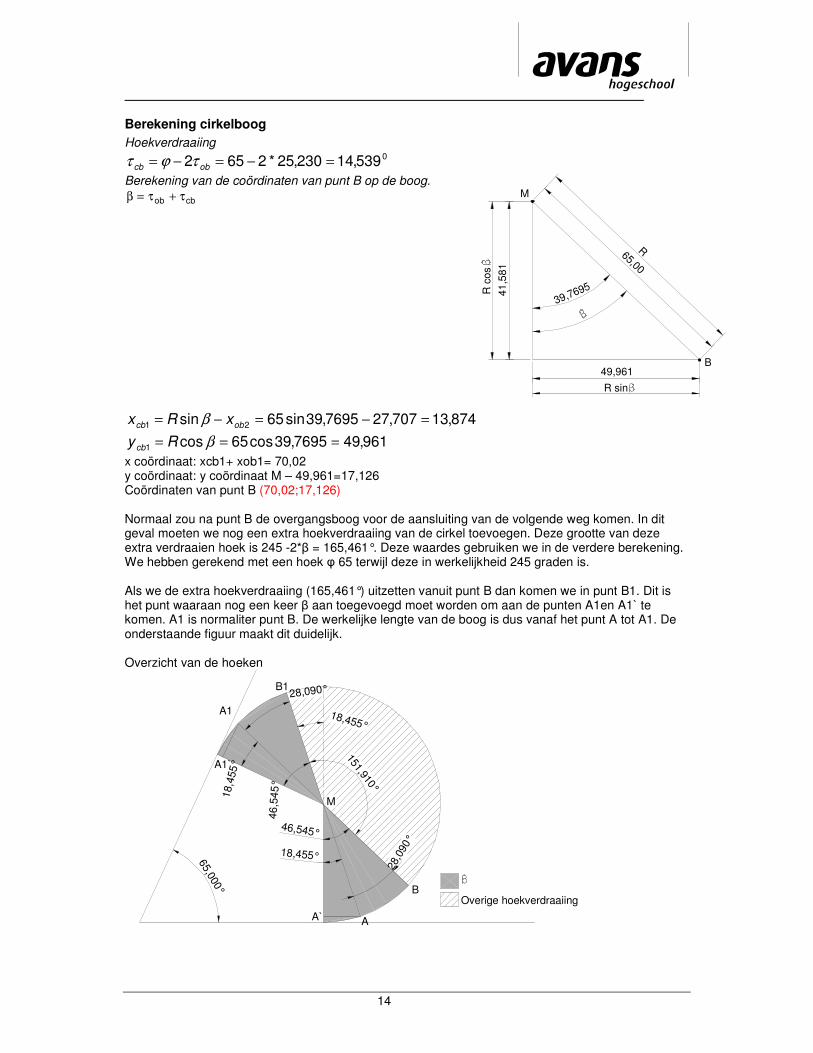
Berekening cirkelboog Hoekverdraaiing
0539,14230,25*2652 =−=−= obcb τϕτ Berekening van de coördinaten van punt B op de boog.
cbob τ+τ=β
874,13707,277695,39sin65sin 21 =−=−= obcb xRx β
961,497695,39cos65cos1 === βRy cb x coördinaat: xcb1+ xob1= 70,02 y coördinaat: y coördinaat M – 49,961=17,126 Coördinaten van punt B (70,02;17,126) Normaal zou na punt B de overgangsboog voor de aansluiting van de volgende weg komen. In dit geval moeten we nog een extra hoekverdraaiing van de cirkel toevoegen. Deze grootte van deze extra verdraaien hoek is 245 -2*� = 165,461°. Deze waardes gebruiken we in de verdere berekening. We hebben gerekend met een hoek � 65 terwijl deze in werkelijkheid 245 graden is. Als we de extra hoekverdraaiing (165,461°) uitzetten vanuit punt B dan komen we in punt B1. Dit is het punt waaraan nog een keer � aan toegevoegd moet worden om aan de punten A1en A1` te komen. A1 is normaliter punt B. De werkelijke lengte van de boog is dus vanaf het punt A tot A1. De onderstaande figuur maakt dit duidelijk. Overzicht van de hoeken
Overige hoekverdraaiing
46,545°
18,455°
18,455°
46,5
45°
A1
A1`
M
A` A
65,000°
28,0
90°
18,4
55°
28,090°
151,910°
B
B1
R c
os
R
M
B
R sin
39,769541,5
81
49,961
65,00
15
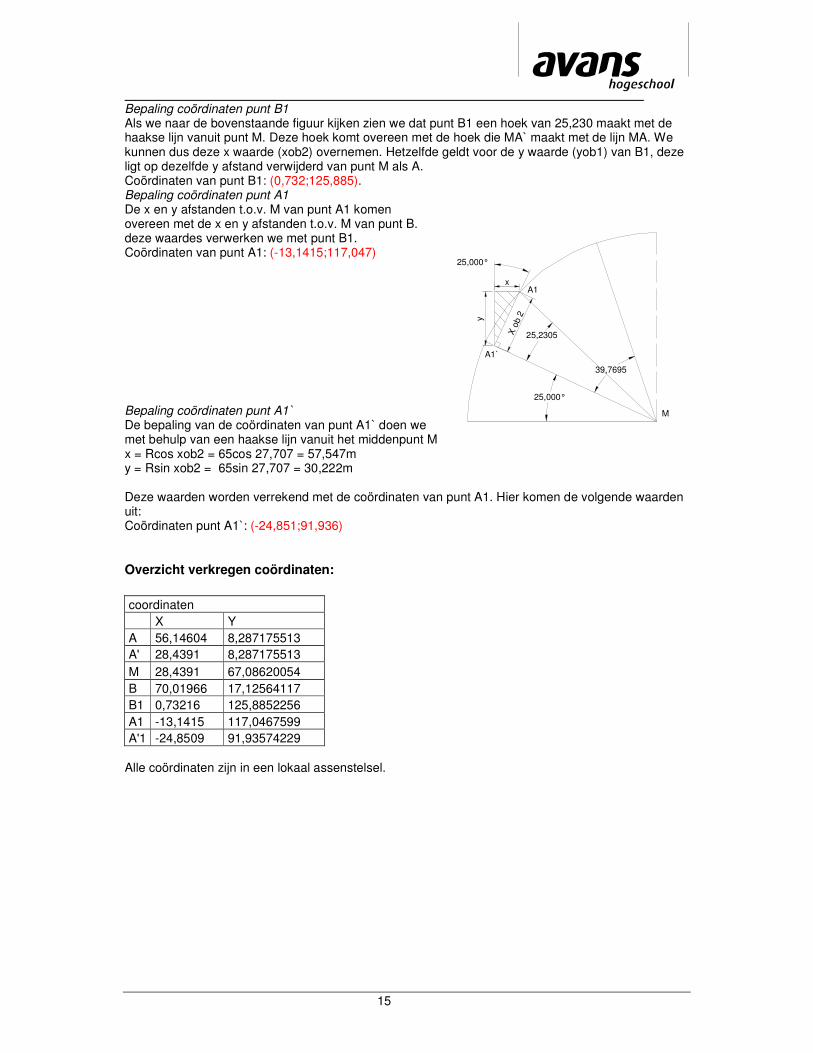
Bepaling coördinaten punt B1 Als we naar de bovenstaande figuur kijken zien we dat punt B1 een hoek van 25,230 maakt met de haakse lijn vanuit punt M. Deze hoek komt overeen met de hoek die MA` maakt met de lijn MA. We kunnen dus deze x waarde (xob2) overnemen. Hetzelfde geldt voor de y waarde (yob1) van B1, deze ligt op dezelfde y afstand verwijderd van punt M als A. Coördinaten van punt B1: (0,732;125,885). Bepaling coördinaten punt A1 De x en y afstanden t.o.v. M van punt A1 komen overeen met de x en y afstanden t.o.v. M van punt B. deze waardes verwerken we met punt B1. Coördinaten van punt A1: (-13,1415;117,047) Bepaling coördinaten punt A1` De bepaling van de coördinaten van punt A1` doen we met behulp van een haakse lijn vanuit het middenpunt M x = Rcos xob2 = 65cos 27,707 = 57,547m y = Rsin xob2 = 65sin 27,707 = 30,222m Deze waarden worden verrekend met de coördinaten van punt A1. Hier komen de volgende waarden uit: Coördinaten punt A1`: (-24,851;91,936)
Overzicht verkregen coördinaten: coordinaten X Y A 56,14604 8,287175513 A' 28,4391 8,287175513 M 28,4391 67,08620054 B 70,01966 17,12564117 B1 0,73216 125,8852256 A1 -13,1415 117,0467599 A'1 -24,8509 91,93574229
Alle coördinaten zijn in een lokaal assenstelsel.
A1
A1`
M
25,000°
25,000°
X ob
2
x
y
25,2305
39,7695
16
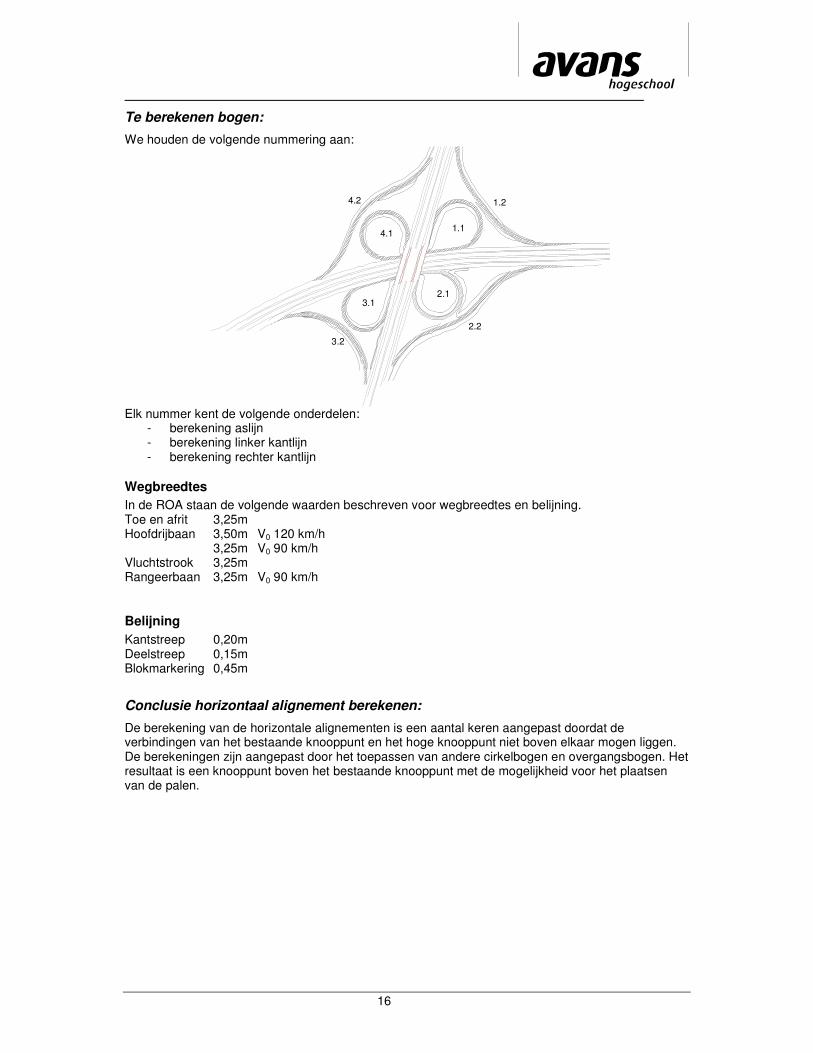
Te berekenen bogen:
We houden de volgende nummering aan:
1.1
3.2
3.1
4.1
1.2
2.2
4.2
2.1
Elk nummer kent de volgende onderdelen:
- berekening aslijn - berekening linker kantlijn - berekening rechter kantlijn
Wegbreedtes In de ROA staan de volgende waarden beschreven voor wegbreedtes en belijning. Toe en afrit 3,25m Hoofdrijbaan 3,50m V0 120 km/h 3,25m V0 90 km/h Vluchtstrook 3,25m Rangeerbaan 3,25m V0 90 km/h
Belijning Kantstreep 0,20m Deelstreep 0,15m Blokmarkering 0,45m
Conclusie horizontaal alignement berekenen:
De berekening van de horizontale alignementen is een aantal keren aangepast doordat de verbindingen van het bestaande knooppunt en het hoge knooppunt niet boven elkaar mogen liggen. De berekeningen zijn aangepast door het toepassen van andere cirkelbogen en overgangsbogen. Het resultaat is een knooppunt boven het bestaande knooppunt met de mogelijkheid voor het plaatsen van de palen.
17
Verticaal alignement
Berekeningsmethode
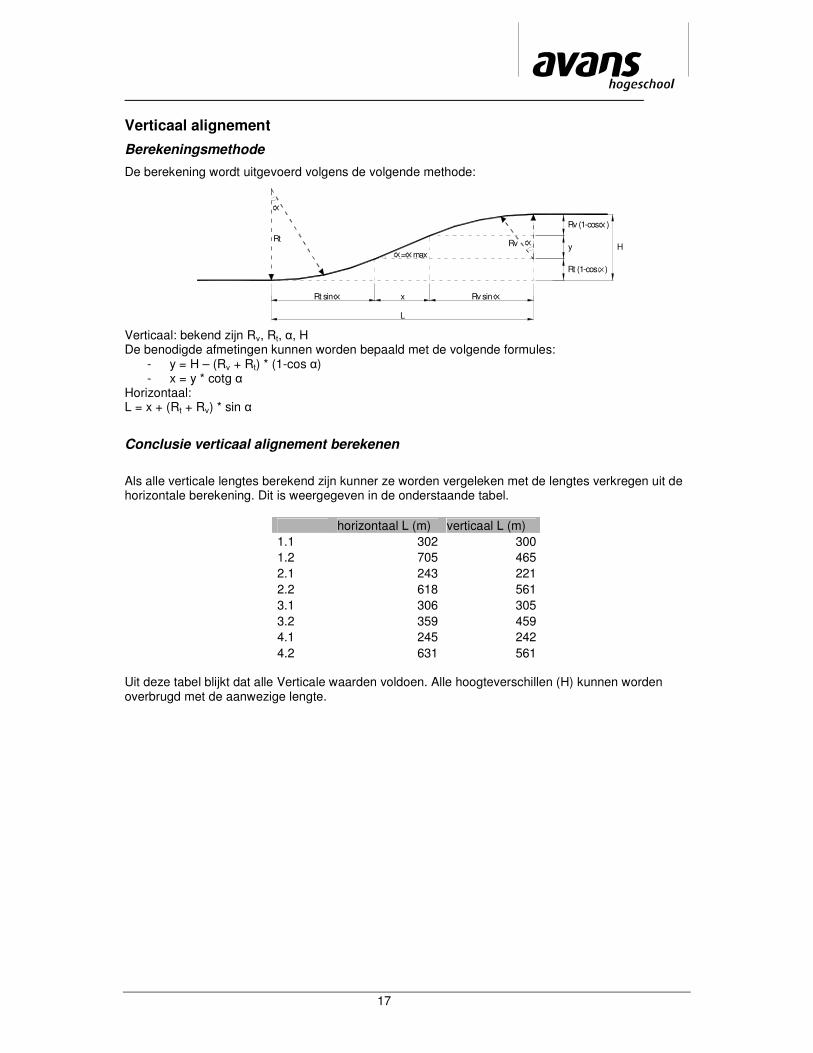
De berekening wordt uitgevoerd volgens de volgende methode:
x
L
Rt sin
Rt
Rv sin
= maxRv
Rv (1-cos )
Rt (1-cos )
y H
Verticaal: bekend zijn Rv, Rt, �, H De benodigde afmetingen kunnen worden bepaald met de volgende formules:
- y = H – (Rv + Rt) * (1-cos �) - x = y * cotg �
Horizontaal: L = x + (Rt + Rv) * sin �
Conclusie verticaal alignement berekenen
Als alle verticale lengtes berekend zijn kunner ze worden vergeleken met de lengtes verkregen uit de horizontale berekening. Dit is weergegeven in de onderstaande tabel.
horizontaal L (m) verticaal L (m) 1.1 302 300 1.2 705 465 2.1 243 221 2.2 618 561 3.1 306 305 3.2 359 459 4.1 245 242 4.2 631 561
Uit deze tabel blijkt dat alle Verticale waarden voldoen. Alle hoogteverschillen (H) kunnen worden overbrugd met de aanwezige lengte.
18
Deel C overzicht spreadsheets
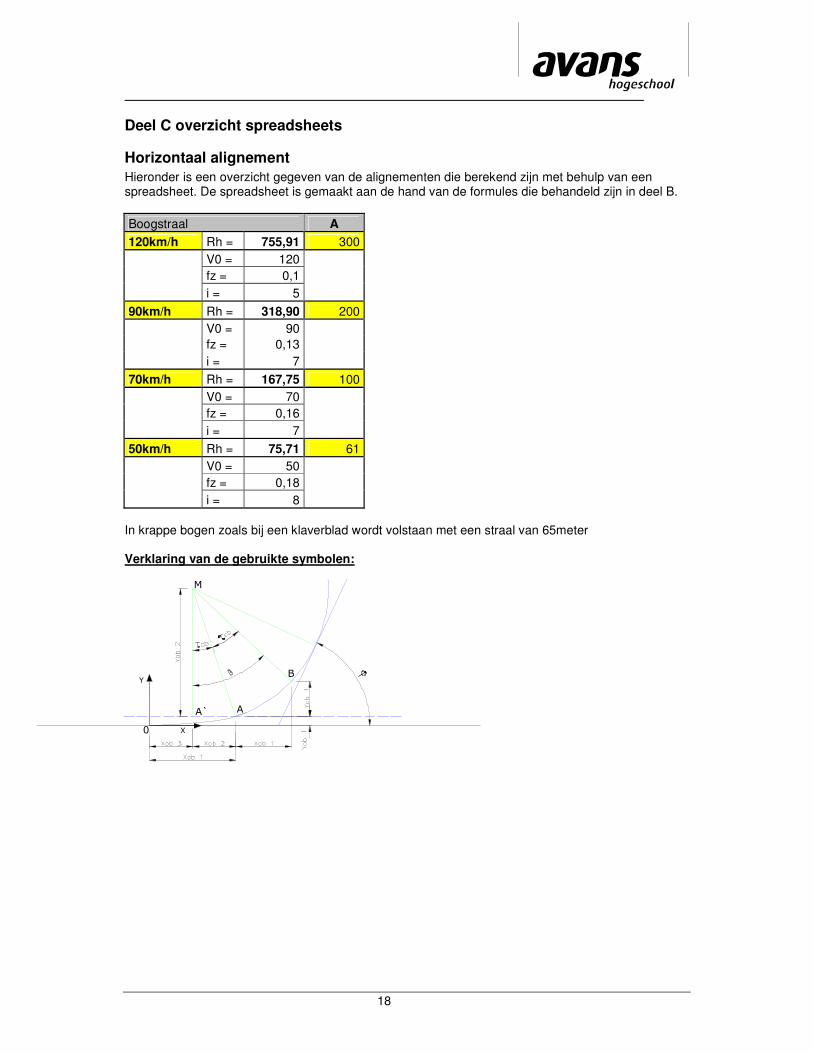
Horizontaal alignement Hieronder is een overzicht gegeven van de alignementen die berekend zijn met behulp van een spreadsheet. De spreadsheet is gemaakt aan de hand van de formules die behandeld zijn in deel B. Boogstraal A 120km/h Rh = 755,91 300 V0 = 120 fz = 0,1 i = 5 90km/h Rh = 318,90 200 V0 = 90 fz = 0,13 i = 7 70km/h Rh = 167,75 100 V0 = 70 fz = 0,16 i = 7 50km/h Rh = 75,71 61 V0 = 50 fz = 0,18 i = 8
In krappe bogen zoals bij een klaverblad wordt volstaan met een straal van 65meter Verklaring van de gebruikte symbolen:
�
�
��
�
�
�
�
19
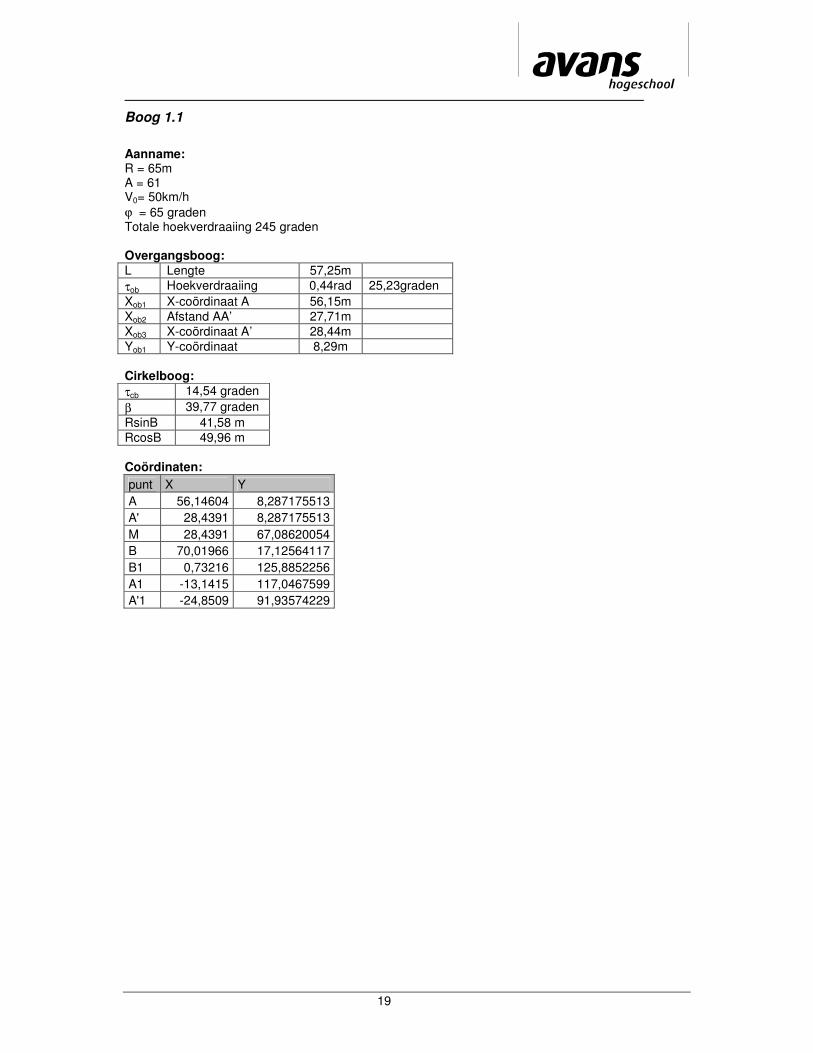
Boog 1.1
Aanname: R = 65m A = 61 V0= 50km/h ϕ = 65 graden Totale hoekverdraaiing 245 graden Overgangsboog: L Lengte 57,25m τob Hoekverdraaiing 0,44rad 25,23graden Xob1 X-coördinaat A 56,15m Xob2 Afstand AA’ 27,71m Xob3 X-coördinaat A’ 28,44m Yob1 Y-coördinaat 8,29m Cirkelboog: τcb 14,54 graden β 39,77 graden RsinB 41,58 m RcosB 49,96 m Coördinaten: punt X Y A 56,14604 8,287175513 A' 28,4391 8,287175513 M 28,4391 67,08620054 B 70,01966 17,12564117 B1 0,73216 125,8852256 A1 -13,1415 117,0467599 A'1 -24,8509 91,93574229
20
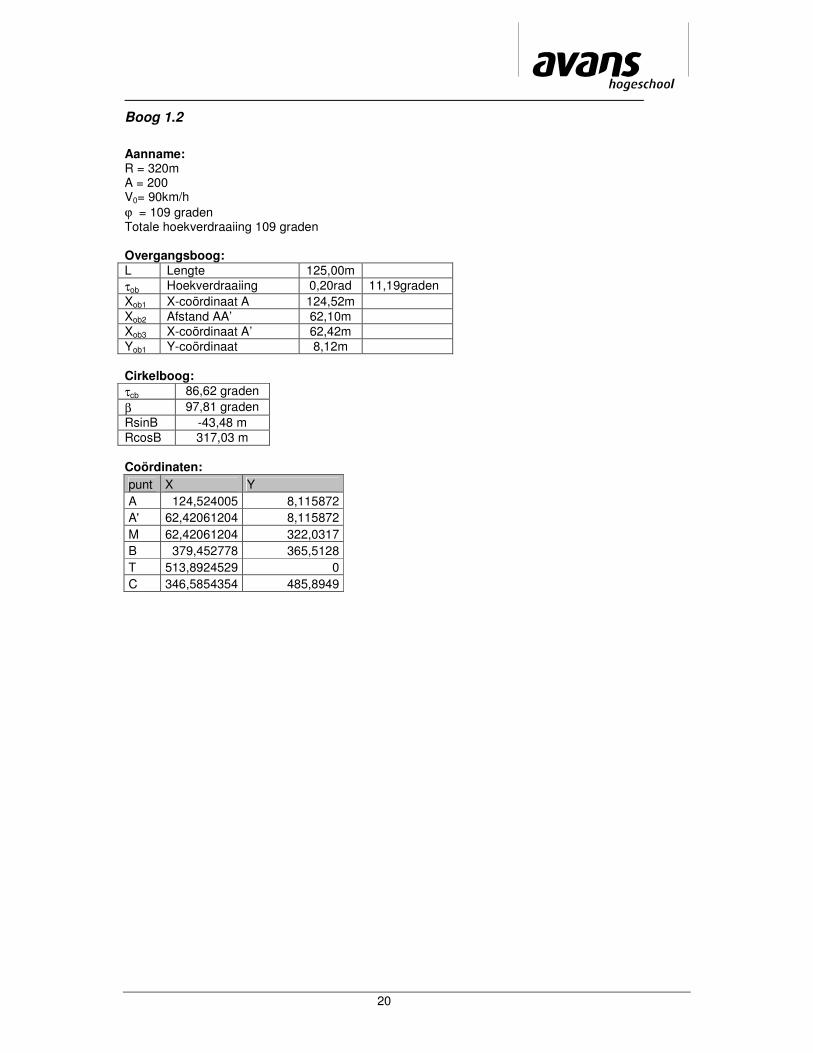
Boog 1.2
Aanname: R = 320m A = 200 V0= 90km/h ϕ = 109 graden Totale hoekverdraaiing 109 graden Overgangsboog: L Lengte 125,00m τob Hoekverdraaiing 0,20rad 11,19graden Xob1 X-coördinaat A 124,52m Xob2 Afstand AA’ 62,10m Xob3 X-coördinaat A’ 62,42m Yob1 Y-coördinaat 8,12m Cirkelboog: τcb 86,62 graden β 97,81 graden RsinB -43,48 m RcosB 317,03 m Coördinaten: punt X Y A 124,524005 8,115872 A' 62,42061204 8,115872 M 62,42061204 322,0317 B 379,452778 365,5128 T 513,8924529 0 C 346,5854354 485,8949
21
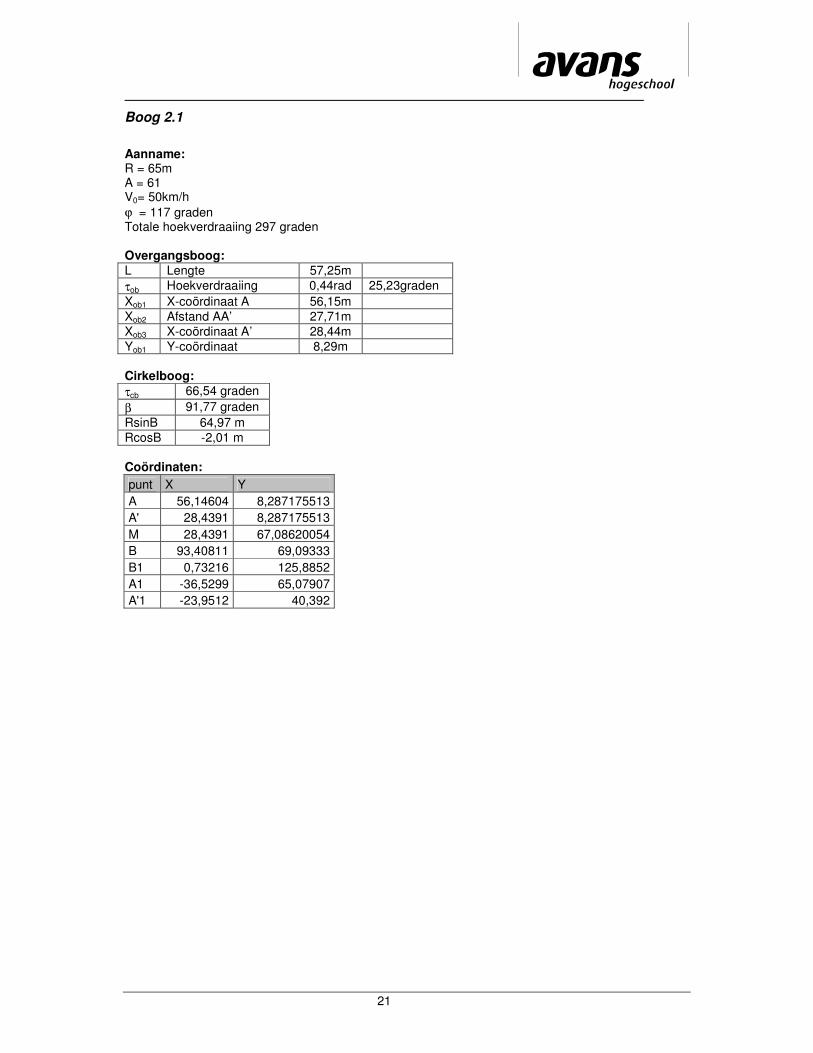
Boog 2.1
Aanname: R = 65m A = 61 V0= 50km/h ϕ = 117 graden Totale hoekverdraaiing 297 graden Overgangsboog: L Lengte 57,25m τob Hoekverdraaiing 0,44rad 25,23graden Xob1 X-coördinaat A 56,15m Xob2 Afstand AA’ 27,71m Xob3 X-coördinaat A’ 28,44m Yob1 Y-coördinaat 8,29m Cirkelboog: τcb 66,54 graden β 91,77 graden RsinB 64,97 m RcosB -2,01 m Coördinaten: punt X Y A 56,14604 8,287175513 A' 28,4391 8,287175513 M 28,4391 67,08620054 B 93,40811 69,09333 B1 0,73216 125,8852 A1 -36,5299 65,07907 A'1 -23,9512 40,392
22
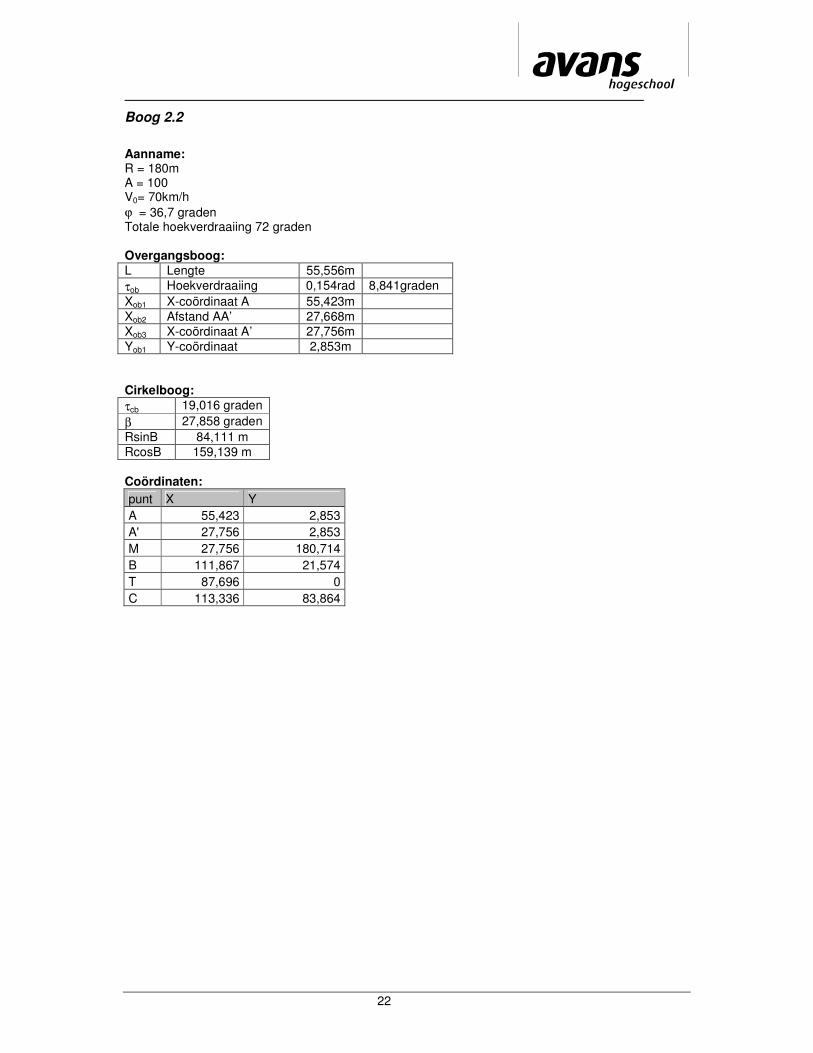
Boog 2.2
Aanname: R = 180m A = 100 V0= 70km/h ϕ = 36,7 graden Totale hoekverdraaiing 72 graden Overgangsboog: L Lengte 55,556m τob Hoekverdraaiing 0,154rad 8,841graden Xob1 X-coördinaat A 55,423m Xob2 Afstand AA’ 27,668m Xob3 X-coördinaat A’ 27,756m Yob1 Y-coördinaat 2,853m Cirkelboog: τcb 19,016 graden β 27,858 graden RsinB 84,111 m RcosB 159,139 m Coördinaten: punt X Y A 55,423 2,853 A' 27,756 2,853 M 27,756 180,714 B 111,867 21,574 T 87,696 0 C 113,336 83,864
23
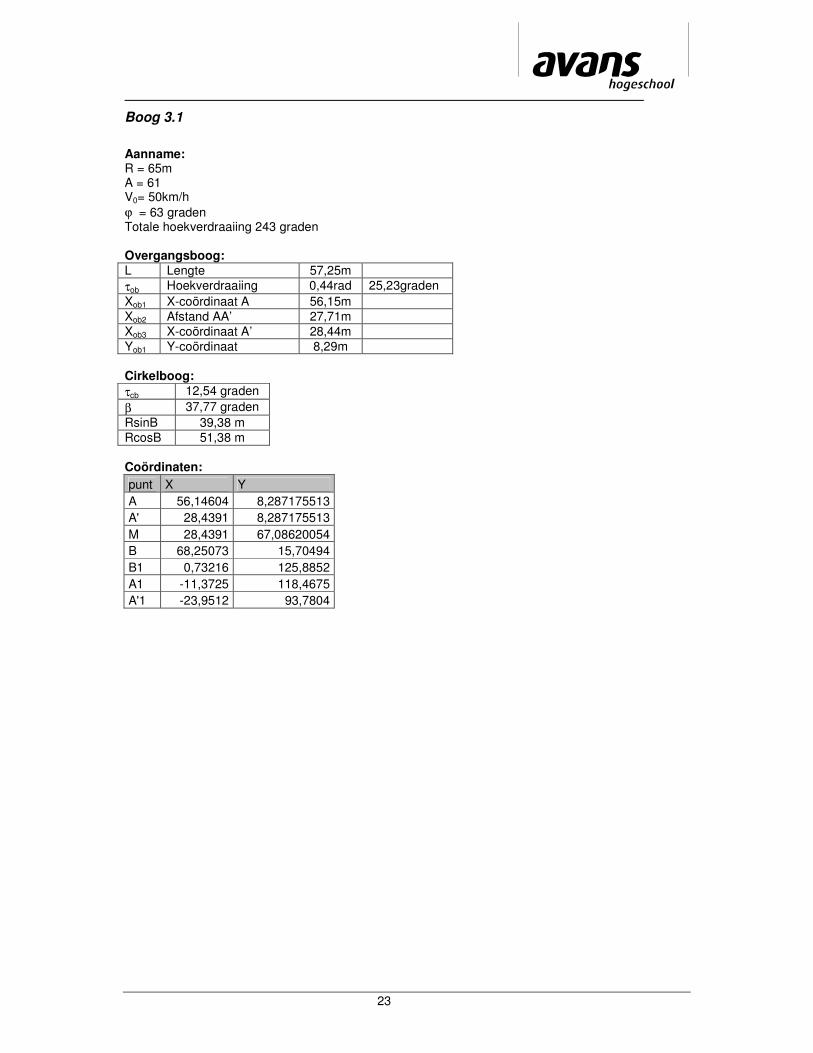
Boog 3.1
Aanname: R = 65m A = 61 V0= 50km/h ϕ = 63 graden Totale hoekverdraaiing 243 graden Overgangsboog: L Lengte 57,25m τob Hoekverdraaiing 0,44rad 25,23graden Xob1 X-coördinaat A 56,15m Xob2 Afstand AA’ 27,71m Xob3 X-coördinaat A’ 28,44m Yob1 Y-coördinaat 8,29m Cirkelboog: τcb 12,54 graden β 37,77 graden RsinB 39,38 m RcosB 51,38 m Coördinaten: punt X Y A 56,14604 8,287175513 A' 28,4391 8,287175513 M 28,4391 67,08620054 B 68,25073 15,70494 B1 0,73216 125,8852 A1 -11,3725 118,4675 A'1 -23,9512 93,7804
24
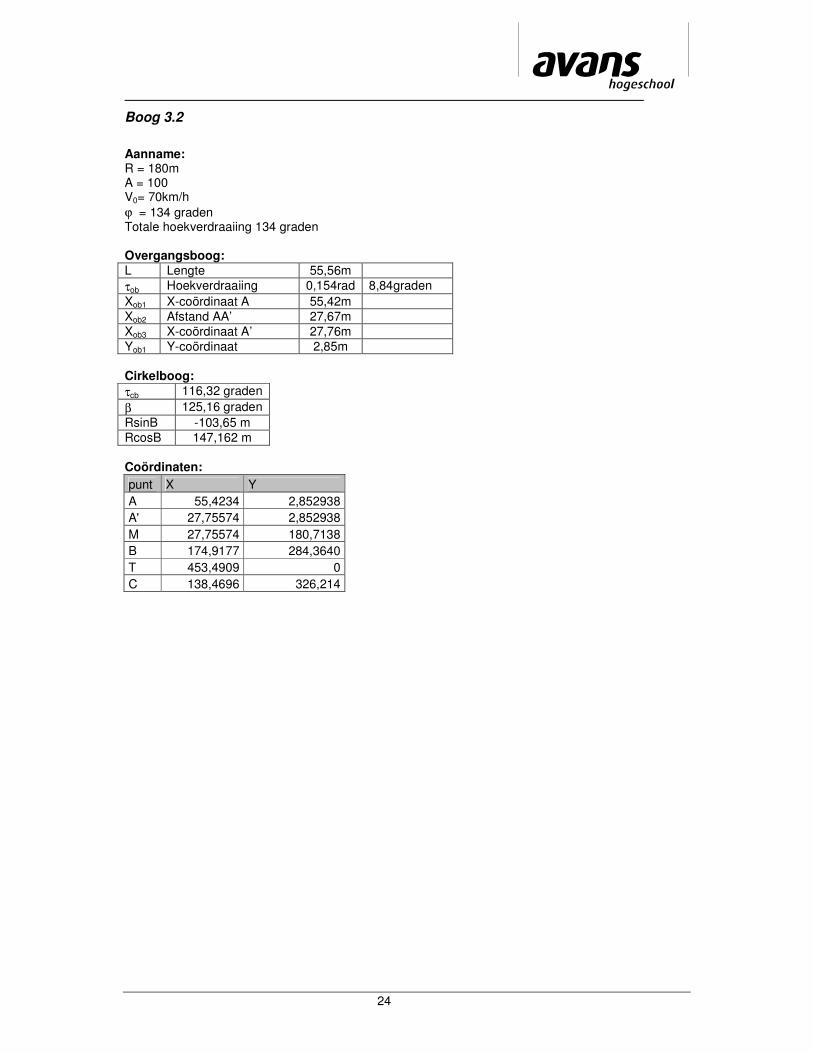
Boog 3.2
Aanname: R = 180m A = 100 V0= 70km/h ϕ = 134 graden Totale hoekverdraaiing 134 graden Overgangsboog: L Lengte 55,56m τob Hoekverdraaiing 0,154rad 8,84graden Xob1 X-coördinaat A 55,42m Xob2 Afstand AA’ 27,67m Xob3 X-coördinaat A’ 27,76m Yob1 Y-coördinaat 2,85m Cirkelboog: τcb 116,32 graden β 125,16 graden RsinB -103,65 m RcosB 147,162 m Coördinaten: punt X Y A 55,4234 2,852938 A' 27,75574 2,852938 M 27,75574 180,7138 B 174,9177 284,3640 T 453,4909 0 C 138,4696 326,214
25
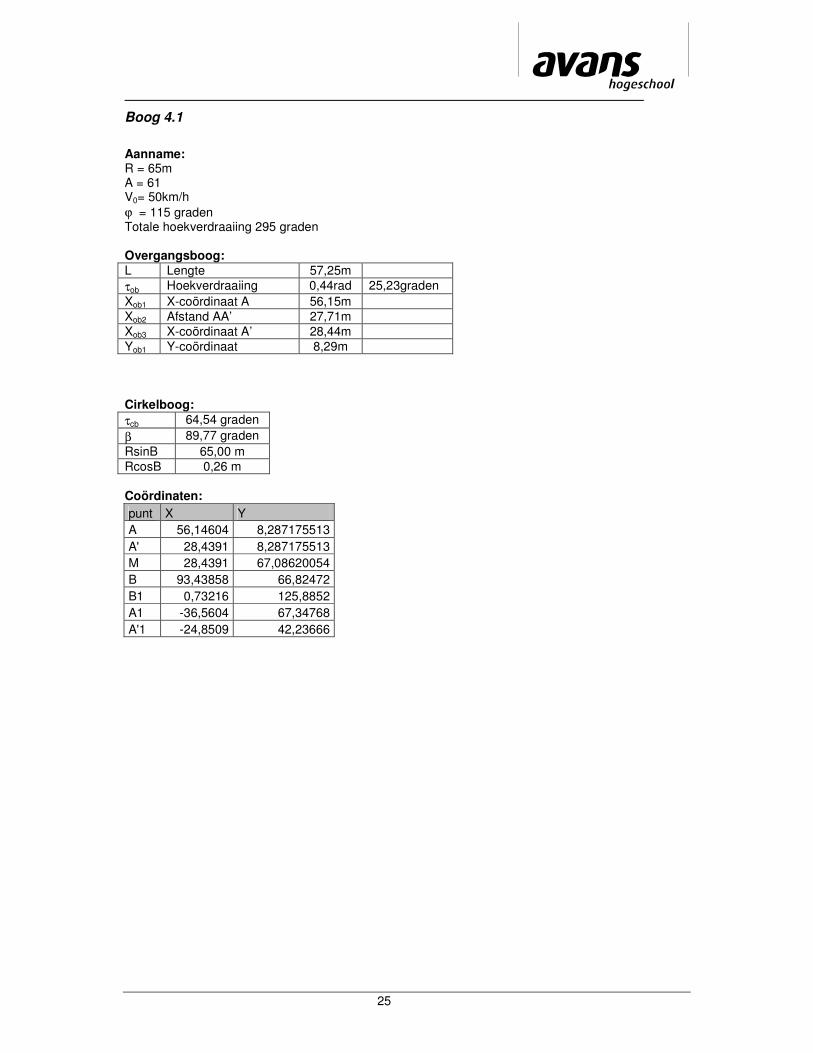
Boog 4.1
Aanname: R = 65m A = 61 V0= 50km/h ϕ = 115 graden Totale hoekverdraaiing 295 graden Overgangsboog: L Lengte 57,25m τob Hoekverdraaiing 0,44rad 25,23graden Xob1 X-coördinaat A 56,15m Xob2 Afstand AA’ 27,71m Xob3 X-coördinaat A’ 28,44m Yob1 Y-coördinaat 8,29m Cirkelboog: τcb 64,54 graden β 89,77 graden RsinB 65,00 m RcosB 0,26 m Coördinaten: punt X Y A 56,14604 8,287175513 A' 28,4391 8,287175513 M 28,4391 67,08620054 B 93,43858 66,82472 B1 0,73216 125,8852 A1 -36,5604 67,34768 A'1 -24,8509 42,23666
26
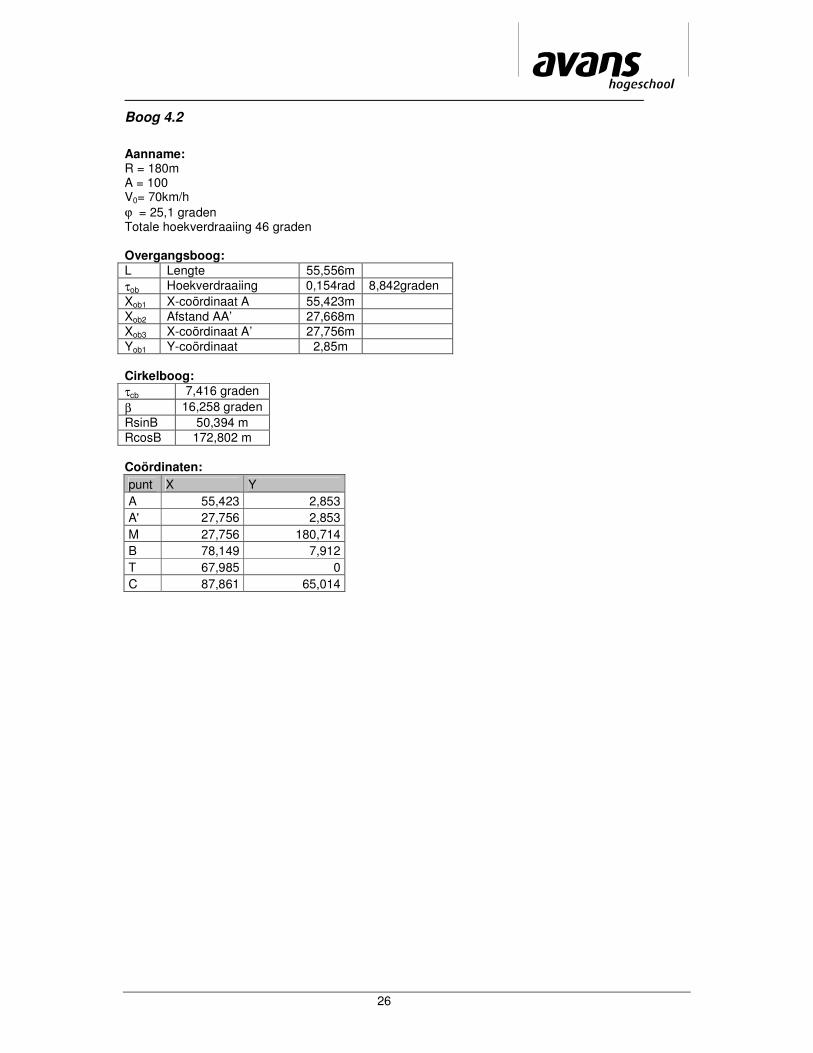
Boog 4.2
Aanname: R = 180m A = 100 V0= 70km/h ϕ = 25,1 graden Totale hoekverdraaiing 46 graden Overgangsboog: L Lengte 55,556m τob Hoekverdraaiing 0,154rad 8,842graden Xob1 X-coördinaat A 55,423m Xob2 Afstand AA’ 27,668m Xob3 X-coördinaat A’ 27,756m Yob1 Y-coördinaat 2,85m Cirkelboog: τcb 7,416 graden β 16,258 graden RsinB 50,394 m RcosB 172,802 m Coördinaten: punt X Y A 55,423 2,853 A' 27,756 2,853 M 27,756 180,714 B 78,149 7,912 T 67,985 0 C 87,861 65,014
27
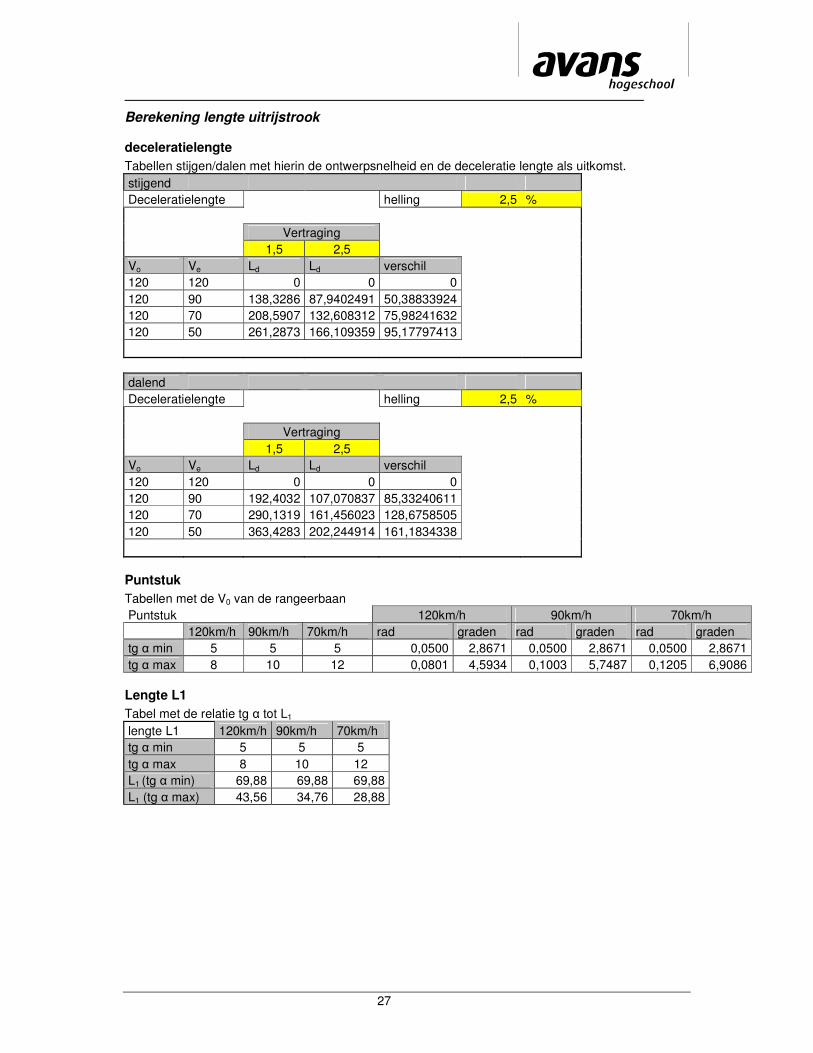
Berekening lengte uitrijstrook
deceleratielengte Tabellen stijgen/dalen met hierin de ontwerpsnelheid en de deceleratie lengte als uitkomst. stijgend Deceleratielengte helling 2,5 % Vertraging 1,5 2,5 Vo Ve Ld Ld verschil 120 120 0 0 0 120 90 138,3286 87,9402491 50,38833924 120 70 208,5907 132,608312 75,98241632 120 50 261,2873 166,109359 95,17797413
dalend Deceleratielengte helling 2,5 % Vertraging 1,5 2,5 Vo Ve Ld Ld verschil 120 120 0 0 0 120 90 192,4032 107,070837 85,33240611 120 70 290,1319 161,456023 128,6758505 120 50 363,4283 202,244914 161,1834338
Puntstuk Tabellen met de V0 van de rangeerbaan Puntstuk 120km/h 90km/h 70km/h 120km/h 90km/h 70km/h rad graden rad graden rad graden tg � min 5 5 5 0,0500 2,8671 0,0500 2,8671 0,0500 2,8671 tg � max 8 10 12 0,0801 4,5934 0,1003 5,7487 0,1205 6,9086
Lengte L1 Tabel met de relatie tg � tot L1 lengte L1 120km/h 90km/h 70km/h tg � min 5 5 5 tg � max 8 10 12 L1 (tg � min) 69,88 69,88 69,88 L1 (tg � max) 43,56 34,76 28,88
28
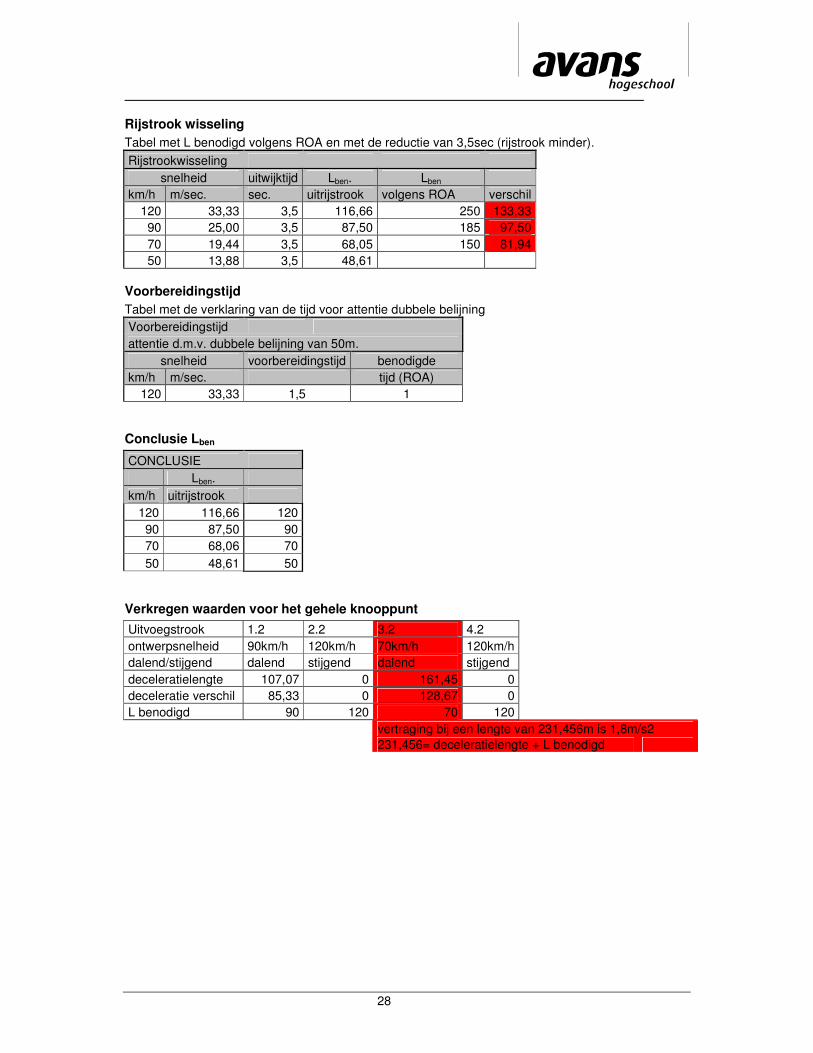
Rijstrook wisseling Tabel met L benodigd volgens ROA en met de reductie van 3,5sec (rijstrook minder). Rijstrookwisseling
snelheid uitwijktijd Lben. Lben km/h m/sec. sec. uitrijstrook volgens ROA verschil
120 33,33 3,5 116,66 250 133,33 90 25,00 3,5 87,50 185 97,50 70 19,44 3,5 68,05 150 81,94 50 13,88 3,5 48,61
Voorbereidingstijd Tabel met de verklaring van de tijd voor attentie dubbele belijning Voorbereidingstijd attentie d.m.v. dubbele belijning van 50m.
snelheid voorbereidingstijd benodigde km/h m/sec. tijd (ROA)
120 33,33 1,5 1
Conclusie Lben
CONCLUSIE Lben. km/h uitrijstrook
120 116,66 120 90 87,50 90 70 68,06 70 50 48,61 50
Verkregen waarden voor het gehele knooppunt Uitvoegstrook 1.2 2.2 3.2 4.2 ontwerpsnelheid 90km/h 120km/h 70km/h 120km/h dalend/stijgend dalend stijgend dalend stijgend deceleratielengte 107,07 0 161,45 0 deceleratie verschil 85,33 0 128,67 0 L benodigd 90 120 70 120 vertraging bij een lengte van 231,456m is 1,8m/s2 231,456= deceleratielengte + L benodigd
29
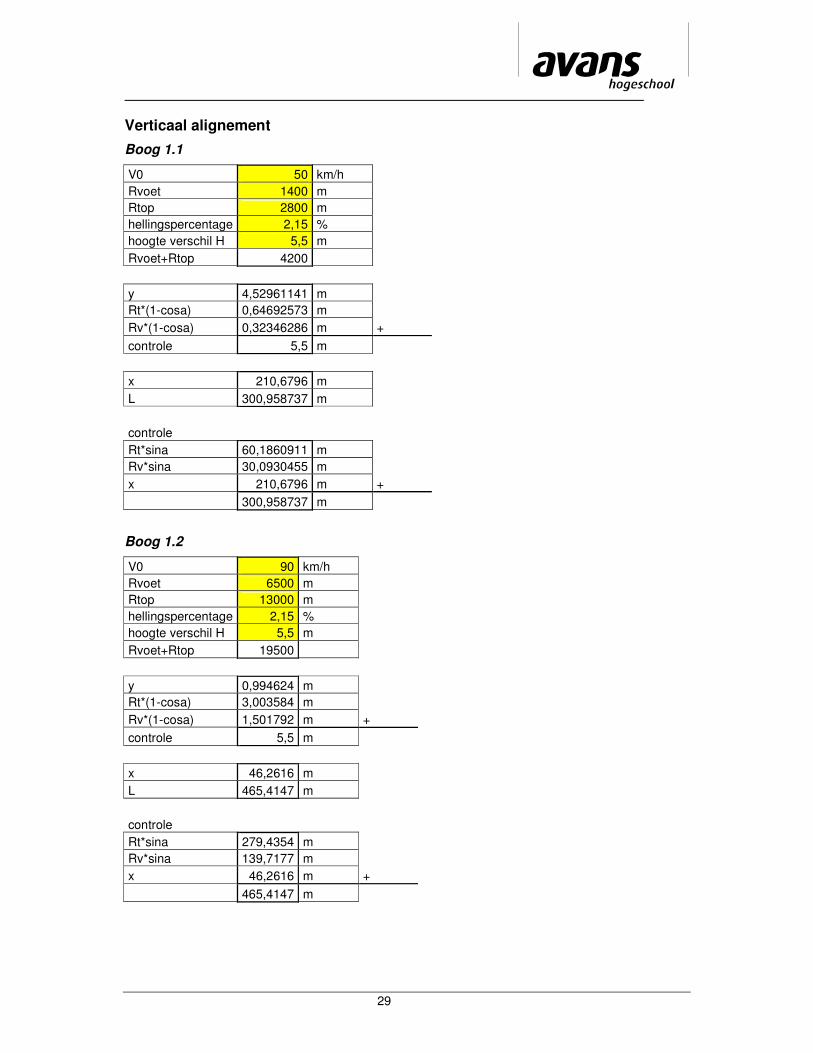
Verticaal alignement
Boog 1.1
V0 50 km/h Rvoet 1400 m Rtop 2800 m hellingspercentage 2,15 % hoogte verschil H 5,5 m Rvoet+Rtop 4200 y 4,52961141 m Rt*(1-cosa) 0,64692573 m Rv*(1-cosa) 0,32346286 m + controle 5,5 m x 210,6796 m L 300,958737 m controle Rt*sina 60,1860911 m Rv*sina 30,0930455 m x 210,6796 m + 300,958737 m �
Boog 1.2
V0 90 km/h Rvoet 6500 m Rtop 13000 m hellingspercentage 2,15 % hoogte verschil H 5,5 m Rvoet+Rtop 19500 y 0,994624 m Rt*(1-cosa) 3,003584 m Rv*(1-cosa) 1,501792 m + controle 5,5 m x 46,2616 m L 465,4147 m controle Rt*sina 279,4354 m Rv*sina 139,7177 m x 46,2616 m + 465,4147 m �
30
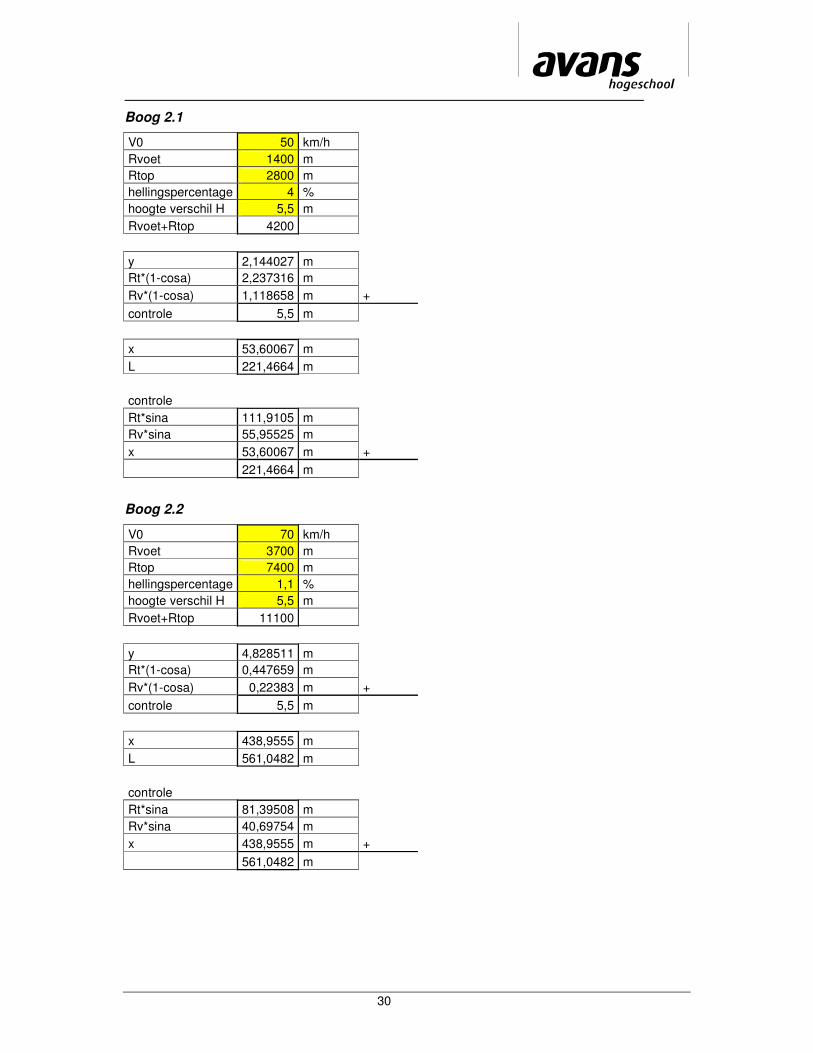
Boog 2.1
V0 50 km/h Rvoet 1400 m Rtop 2800 m hellingspercentage 4 % hoogte verschil H 5,5 m Rvoet+Rtop 4200 y 2,144027 m Rt*(1-cosa) 2,237316 m Rv*(1-cosa) 1,118658 m + controle 5,5 m x 53,60067 m L 221,4664 m controle Rt*sina 111,9105 m Rv*sina 55,95525 m x 53,60067 m + 221,4664 m �
Boog 2.2
V0 70 km/h Rvoet 3700 m Rtop 7400 m hellingspercentage 1,1 % hoogte verschil H 5,5 m Rvoet+Rtop 11100 y 4,828511 m Rt*(1-cosa) 0,447659 m Rv*(1-cosa) 0,22383 m + controle 5,5 m x 438,9555 m L 561,0482 m controle Rt*sina 81,39508 m Rv*sina 40,69754 m x 438,9555 m + 561,0482 m �
31
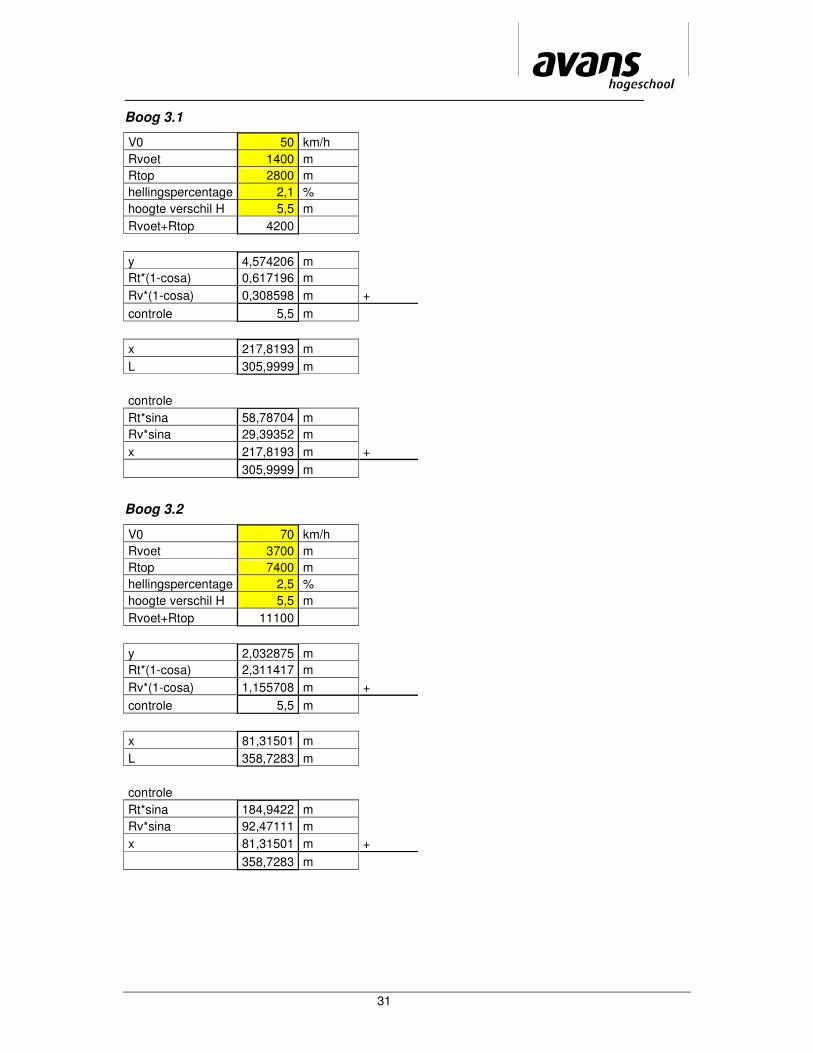
Boog 3.1
V0 50 km/h Rvoet 1400 m Rtop 2800 m hellingspercentage 2,1 % hoogte verschil H 5,5 m Rvoet+Rtop 4200 y 4,574206 m Rt*(1-cosa) 0,617196 m Rv*(1-cosa) 0,308598 m + controle 5,5 m x 217,8193 m L 305,9999 m controle Rt*sina 58,78704 m Rv*sina 29,39352 m x 217,8193 m + 305,9999 m �
Boog 3.2
V0 70 km/h Rvoet 3700 m Rtop 7400 m hellingspercentage 2,5 % hoogte verschil H 5,5 m Rvoet+Rtop 11100 y 2,032875 m Rt*(1-cosa) 2,311417 m Rv*(1-cosa) 1,155708 m + controle 5,5 m x 81,31501 m L 358,7283 m controle Rt*sina 184,9422 m Rv*sina 92,47111 m x 81,31501 m + 358,7283 m �
32
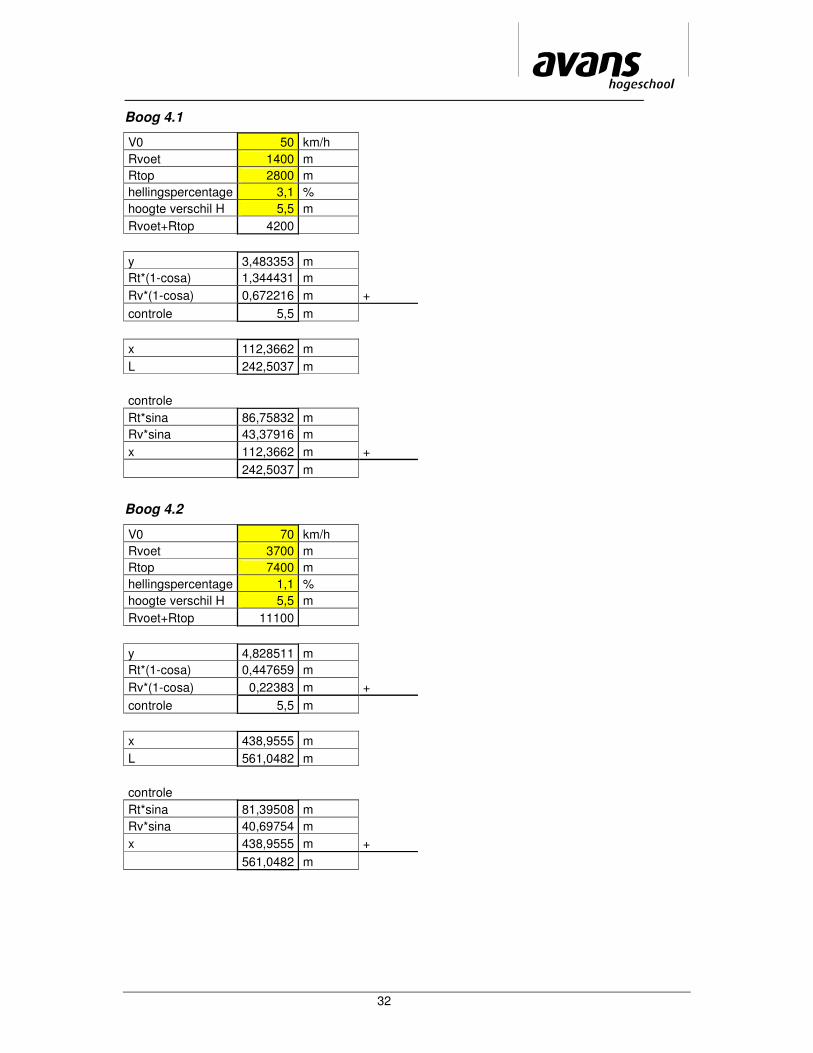
Boog 4.1
V0 50 km/h Rvoet 1400 m Rtop 2800 m hellingspercentage 3,1 % hoogte verschil H 5,5 m Rvoet+Rtop 4200 y 3,483353 m Rt*(1-cosa) 1,344431 m Rv*(1-cosa) 0,672216 m + controle 5,5 m x 112,3662 m L 242,5037 m controle Rt*sina 86,75832 m Rv*sina 43,37916 m x 112,3662 m + 242,5037 m �
Boog 4.2
V0 70 km/h Rvoet 3700 m Rtop 7400 m hellingspercentage 1,1 % hoogte verschil H 5,5 m Rvoet+Rtop 11100 y 4,828511 m Rt*(1-cosa) 0,447659 m Rv*(1-cosa) 0,22383 m + controle 5,5 m x 438,9555 m L 561,0482 m controle Rt*sina 81,39508 m Rv*sina 40,69754 m x 438,9555 m + 561,0482 m �